Всички въведени по-рано величини характеризират само механично движение. Съществуват обаче много форми на движение на материята и има постоянен преход от една форма на движение към друга. Необходимо е да се въведе физическо количество, което характеризира движението на материята във всички форми на нейното съществуване, с помощта на което би било възможно количествено да се сравняват различни форми на движение на материята.
Енергия- мярка за движението на материята във всичките й форми. Основното свойство на всички видове енергия е взаимопреобразуемостта. Енергийният резерв, който тялото притежава, се определя от максималната работа, която тялото може да извърши след пълно изразходване на енергията си. Енергията е числено равна на максималната работа, която тялото може да извърши, и се измерва в същите единици като работата. Когато енергията преминава от един тип в друг, трябва да изчислите енергията на тялото или системата преди и след прехода и да вземете тяхната разлика. Тази разлика обикновено се нарича работа: .
Така физическото количество, характеризиращо способността на тялото да извършва работа, се нарича енергия.
Механичната енергия на тялото може да бъде причинена или от движението на тялото с определена скорост, или от присъствието на тялото в потенциално поле от сили.
Кинетична енергия.
Енергията, която тялото притежава поради своето движение, се нарича кинетична. Работата, извършена върху тялото, е равна на нарастването на неговата кинетична енергия. Нека намерим тази работа за случая, когато резултатната от всички сили, приложени към тялото, е равна на .
Работата, извършена от тялото поради кинетичната енергия, е равна на загубата на тази енергия.
Потенциална енергия.
Ако във всяка точка на пространството едно тяло е засегнато от други тела със сила, чиято големина може да бъде различна в различни точки, се казва, че тялото е в поле на сили или в силово поле.
Ако линиите на действие на всички тези сили минават през една точка - силовия център на полето - и големината на силата зависи само от разстоянието до този център, тогава такива сили се наричат централни, а полето на такива сили е наречено централно (гравитационно, електрическо поле на точков заряд).
Поле от сили, които са постоянни във времето, се нарича стационарно.
Хомогенно е поле, в което линиите на действие на силите са успоредни прави линии, разположени на еднакво разстояние една от друга.
Всички сили в механиката се делят на консервативни и неконсервативни (или дисипативни).
Силите, чиято работа не зависи от формата на траекторията, а се определя само от началното и крайното положение на тялото в пространството, се наричат консервативен.
Работата, извършена от консервативните сили по затворен път, е нула. Всички централни сили са консервативни. Силите на еластична деформация също са консервативни сили. Ако в полето действат само консервативни сили, полето се нарича потенциално (гравитационно поле).
Силите, чиято работа зависи от формата на пътя, се наричат неконсервативни (сили на триене).
Потенциалната енергия е част от общата механична енергия на системата, която се определя само от взаимното разположение на телата, които изграждат системата, и характера на силите на взаимодействие между тях. Потенциална енергия- това е енергията, която телата или части от тялото притежават поради взаимното им разположение.
Концепцията за потенциална енергия се въвежда по следния начин. Ако едно тяло е в потенциално поле от сили (например в гравитационното поле на Земята), всяка точка в полето може да бъде свързана с определена функция (наречена потенциална енергия), така че работата А 12, извършена върху тялото от полевите сили, когато то се движи от произволна позиция 1 в друга произволна позиция 2, е равно на намаляването на тази функция по пътя 1®2:
където и са стойностите на потенциалната енергия на системата в позиции 1 и 2.
Записаната връзка ни позволява да определим стойността на потенциалната енергия до някаква неизвестна адитивна константа. Това обстоятелство обаче е без значение, т.к всички връзки включват само разликата в потенциалните енергии, съответстващи на две позиции на тялото. Във всяка конкретна задача се приема, че потенциалната енергия на определено положение на тялото е равна на нула, а енергията на други положения се приема спрямо нулевото ниво. Конкретната форма на функцията зависи от природата на силовото поле и избора на нулево ниво. Тъй като нулевото ниво е избрано произволно, може да има отрицателни стойности. Например, ако приемем потенциалната енергия на тяло, разположено на повърхността на Земята, за нула, тогава в полето на гравитацията близо до повърхността на Земята потенциалната енергия на тяло с маса m, повдигнато на височина h над повърхността, е равна до (фиг. 5).
къде е движението на тялото под въздействието на гравитацията;
Потенциалната енергия на същото тяло, лежащо на дъното на дупка с дълбочина H, е равна на
В разглеждания пример говорихме за потенциалната енергия на системата Земя-тяло.
Потенциалната енергия може да бъде притежавана не само от система от взаимодействащи тела, но и от отделно тяло. В този случай потенциалната енергия зависи от взаимното разположение на частите на тялото.
Нека изразим потенциалната енергия на еластично деформирано тяло.
Потенциална енергия на еластична деформация, ако приемем, че потенциалната енергия на недеформирано тяло е нула; к- коефициент на еластичност, х- деформация на тялото.
По принцип едно тяло може едновременно да притежава както кинетична, така и потенциална енергия. Сумата от тези енергии се нарича обща механична енергиятяло: .
Общата механична енергия на системата е равна на сбора от нейната кинетична и потенциална енергия. Общата енергия на една система е равна на сбора от всички видове енергия, които системата притежава.
Законът за запазване на енергията е резултат от обобщаване на много експериментални данни. Идеята за този закон принадлежи на Ломоносов, който очерта закона за запазване на материята и движението, а количествената формулировка е дадена от немския лекар Майер и натуралиста Хелмхолц.
Закон за запазване на механичната енергия: в поле само на консервативни сили общата механична енергия остава постоянна в изолирана система от тела. Наличието на дисипативни сили (сили на триене) води до разсейване (разсейване) на енергията, т.е. превръщайки я в други видове енергия и нарушавайки закона за запазване на механичната енергия.
Закон за запазване и преобразуване на общата енергия: общата енергия на изолирана система е постоянна величина.
Енергията никога не изчезва и не се появява отново, а само се трансформира от един вид в друг в еквивалентни количества. Това е физическата същност на закона за запазване и трансформация на енергията: неразрушимостта на материята и нейното движение.
Енергията е най-важното понятие в механиката. Какво е енергия? Има много определения и ето едно от тях.
Какво е енергия?
Енергията е способността на тялото да извършва работа.
Нека разгледаме тяло, което се движи под въздействието на някакви сили и променя скоростта си от v 1 → на v 2 → . В този случай силите, действащи върху тялото, са извършили определена работа А.
Работата, извършена от всички сили, действащи върху тялото, е равна на работата, извършена от резултантната сила.
F r → = F 1 → + F 2 →
A = F 1 · s · cos α 1 + F 2 · s · cos α 2 = F р cos α .
Нека установим връзка между изменението на скоростта на тялото и работата, извършена от силите, действащи върху тялото. За простота ще приемем, че върху тялото действа една сила F →, насочена по права линия. Под въздействието на тази сила тялото се движи равномерно ускорено и праволинейно. В този случай векторите F → , v → , a → , s → съвпадат по посока и могат да се разглеждат като алгебрични величини.
Работата, извършена от сила F → е равна на A = F s. Движението на тялото се изразява с формулата s = v 2 2 - v 1 2 2 a. Оттук:
A = F s = F v 2 2 - v 1 2 2 a = m a v 2 2 - v 1 2 2 a
A = m v 2 2 - m v 1 2 2 = m v 2 2 2 - m v 1 2 2 .
Както виждаме, работата, извършена от силата, е пропорционална на изменението на квадрата на скоростта на тялото.
Определение. Кинетична енергия
Кинетичната енергия на тялото е равна на половината от произведението на масата на тялото и квадрата на неговата скорост.
Кинетичната енергия е енергията на движение на тялото. При нулева скорост е нула.
Теорема за кинетична енергия
Нека се обърнем отново към разглеждания пример и формулираме теорема за кинетичната енергия на тялото.
Теорема за кинетична енергия
Работата, извършена от сила, приложена към тялото, е равна на промяната в кинетичната енергия на тялото. Това твърдение е вярно и когато тялото се движи под въздействието на сила, променяща се по големина и посока.
A = E K 2 - E K 1 .
Така кинетичната енергия на тяло с маса m, движещо се със скорост v → е равна на работата, която силата трябва да извърши, за да ускори тялото до тази скорост.
A = m v 2 2 = E K .
За да спре едно тяло, трябва да се работи
A = - m v 2 2 =- E K
Кинетичната енергия е енергията на движението. Наред с кинетичната енергия има и потенциална енергия, тоест енергията на взаимодействие между телата, която зависи от тяхното положение.
Например, тяло е издигнато над повърхността на земята. Колкото по-високо се повдига, толкова по-голяма е потенциалната енергия. Когато тялото пада под въздействието на гравитацията, тази сила действа. Освен това работата на гравитацията се определя само от вертикалното движение на тялото и не зависи от траекторията.

важно!
Като цяло можем да говорим за потенциална енергия само в контекста на онези сили, чиято работа не зависи от формата на траекторията на тялото. Такива сили се наричат консервативни.
Примери за консервативни сили: гравитация, еластична сила.
Когато тялото се движи вертикално нагоре, гравитацията извършва отрицателна работа.
Нека разгледаме пример, когато топката се премести от точка с височина h 1 до точка с височина h 2.

В този случай силата на гравитацията извършва работа, равна на
A = - m g (h 2 - h 1) = - (m g h 2 - m g h 1) .
Тази работа е равна на промяната в m g h, взета с обратен знак.
Стойността E P = m g h е потенциалната енергия в гравитационното поле. На нулево ниво (на земята) потенциалната енергия на тялото е нула.
Определение. Потенциална енергия
Потенциалната енергия е част от общата механична енергия на система, разположена в поле на консервативни сили. Потенциалната енергия зависи от позицията на точките, които изграждат системата.
Можем да говорим за потенциална енергия в гравитационното поле, потенциална енергия на сгъстена пружина и др.
Работата, извършена от гравитацията, е равна на промяната в потенциалната енергия, взета с обратен знак.
A = - (EP 2 - E P 1) .
Ясно е, че потенциалната енергия зависи от избора на нулевото ниво (началото на оста OY). Нека подчертаем, че физическият смисъл е промяна потенциална енергия, когато телата се движат едно спрямо друго. За всеки избор на нулево ниво, промяната в потенциалната енергия ще бъде същата.
При изчисляване на движението на телата в гравитационното поле на Земята, но на значителни разстояния от нея, е необходимо да се вземе предвид законът за универсалната гравитация (зависимостта на гравитационната сила от разстоянието до центъра на Земята) . Нека представим формула, изразяваща зависимостта на потенциалната енергия на тялото.
E P = - G m M r .
Тук G е гравитационната константа, M е масата на Земята.
Потенциална енергия на пружината
Нека си представим, че в първия случай сме взели пружина и сме я удължили с количество x. Във втория случай първо удължихме пружината с 2 x и след това я намалихме с x. И в двата случая пружината беше разтегната с x, но това беше направено по различни начини.
В този случай работата, извършена от еластичната сила, когато дължината на пружината се промени с x и в двата случая е една и съща и равна на
A y p r = - A = - k x 2 2 .
Величината E y p = k x 2 2 се нарича потенциална енергия на компресираната пружина. Тя е равна на работата, извършена от еластичната сила при прехода от дадено състояние на тялото към състояние с нулева деформация.
Ако забележите грешка в текста, моля, маркирайте я и натиснете Ctrl+Enter
Поради разположението си в полето на действие на силите. Друга дефиниция: потенциалната енергия е функция на координатите, която е термин в лагранжиана на системата и описва взаимодействието на елементите на системата. Терминът "потенциална енергия" е въведен през 19 век от шотландския инженер и физик Уилям Ранкин.
Единицата за енергия в SI е джаул.
Приема се, че потенциалната енергия е равна на нула за определена конфигурация на тела в пространството, чийто избор се определя от удобството на по-нататъшните изчисления. Процесът на избор на тази конфигурация се нарича нормализиране на потенциалната енергия.
Правилно определение на потенциалната енергия може да се даде само в поле от сили, чиято работа зависи само от началното и крайното положение на тялото, но не и от траекторията на неговото движение. Такива сили се наричат консервативни.
Също така потенциалната енергия е характеристика на взаимодействието на няколко тела или тяло и поле.
Всяка физическа система се стреми към състояние с най-ниска потенциална енергия.
По-стриктно, кинетичната енергия е разликата между общата енергия на системата и нейната енергия на покой; по този начин кинетичната енергия е частта от общата енергия, дължаща се на движение.
Кинетична енергия
Нека разгледаме система, състояща се от една частица и напишем уравнението на движението:
Съществува равнодействаща на всички сили, действащи върху тялото. Нека скаларно умножим уравнението по изместването на частицата. Имайки предвид това, получаваме:
- инерционен момент на тялото
- ъглова скорост на тялото.
Закон за запазване на енергията.
Законът за запазване на енергията е основен природен закон, установен емпирично, който гласи, че енергията на изолирана (затворена) физическа система се запазва във времето. С други думи, енергията не може да възникне от нищото и не може да изчезне в нищото, тя може само да преминава от една форма в друга.
От фундаментална гледна точка, според теоремата на Ньотер, законът за запазване на енергията е следствие от хомогенността на времето и в този смисъл е универсален, тоест присъщ на системи с много различна физическа природа. С други думи, за всяка конкретна затворена система, независимо от нейното естество, е възможно да се определи определено количество, наречено енергия, което ще се запази във времето. Освен това изпълнението на този закон за запазване във всяка конкретна система е оправдано от подчиняването на тази система на нейните специфични закони на динамика, които обикновено се различават за различните системи.
Въпреки това, в различните клонове на физиката, поради исторически причини, законът за запазване на енергията се формулира по различен начин и следователно говори за запазване на различни видове енергия. Например в термодинамиката законът за запазване на енергията се изразява като първия закон на термодинамиката.
Тъй като законът за запазване на енергията не се прилага за конкретни количества и явления, а отразява общ модел, който е приложим навсякъде и винаги, по-правилно е да го наречем не закон, а принцип за запазване на енергията.
От математическа гледна точка законът за запазване на енергията е еквивалентен на твърдението, че система от диференциални уравнения, описващи динамиката на дадена физическа система, има първи интеграл на движението, свързан с
Импулс на тялото
Импулсът на тялото е величина, равна на произведението на масата на тялото и неговата скорост.
Трябва да се помни, че говорим за тяло, което може да бъде представено като материална точка. Инерцията на тялото ($p$) се нарича още импулс. Понятието импулс е въведено във физиката от Рене Декарт (1596–1650). Терминът „импулс“ се появява по-късно (impulsus на латински означава „тласък“). Импулсът е векторна величина (като скорост) и се изразява по формулата:
$p↖(→)=mυ↖(→)$
Посоката на вектора на импулса винаги съвпада с посоката на скоростта.
Единицата за импулс в SI е импулсът на тяло с маса $1$ kg, движещо се със скорост $1$ m/s; следователно единицата за импулс е $1$ kg $·$ m/s.
Ако върху тяло (материална точка) действа постоянна сила за период от време $∆t$, тогава ускорението също ще бъде постоянно:
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
където $(υ_1)↖(→)$ и $(υ_2)↖(→)$ са началната и крайната скорости на тялото. Замествайки тази стойност в израза на втория закон на Нютон, получаваме:
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
Като отворим скобите и използваме израза за импулса на тялото, имаме:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
Тук $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ е промяната в импулса във времето $∆t$. Тогава предишното уравнение ще приеме формата:
$∆p↖(→)=F↖(→)∆t$
Изразът $∆p↖(→)=F↖(→)∆t$ е математическо представяне на втория закон на Нютон.
Произведението на сила и продължителността на нейното действие се нарича импулс на сила. Ето защо изменението на импулса на дадена точка е равно на изменението на импулса на действащата върху нея сила.
Изразът $∆p↖(→)=F↖(→)∆t$ се нарича уравнение на движението на тялото. Трябва да се отбележи, че едно и също действие - промяна в импулса на точка - може да бъде постигнато от малка сила за дълъг период от време и от голяма сила за кратък период от време.
Импулс на системата тел. Закон за промяна на импулса
Импулсът (количеството на движение) на механична система е вектор, равен на сумата от импулсите на всички материални точки на тази система:
$(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
Законите за промяна и запазване на импулса са следствие от втория и третия закон на Нютон.
Нека разгледаме система, състояща се от две тела. Силите ($F_(12)$ и $F_(21)$ на фигурата, с които телата на системата взаимодействат едно с друго, се наричат вътрешни.
Нека в допълнение към вътрешните сили върху системата действат външни сили $(F_1)↖(→)$ и $(F_2)↖(→)$. За всяко тяло можем да напишем уравнението $∆p↖(→)=F↖(→)∆t$. Събирайки лявата и дясната страна на тези уравнения, получаваме:
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
Според третия закон на Нютон $(F_(12))↖(→)=-(F_(21))↖(→)$.
следователно
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
От лявата страна има геометрична сума от промените в импулсите на всички тела на системата, равна на промяната в импулса на самата система - $(∆p_(syst))↖(→)$. Като се има предвид това сметка, равенството $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ може да бъде написано:
$(∆p_(syst))↖(→)=F↖(→)∆t$
където $F↖(→)$ е сумата от всички външни сили, действащи върху тялото. Полученият резултат означава, че импулсът на системата може да се промени само от външни сили и промяната в импулса на системата е насочена по същия начин като общата външна сила. Това е същността на закона за промяна на импулса на механичната система.
Вътрешните сили не могат да променят общия импулс на системата. Те променят само импулсите на отделните тела на системата.
Закон за запазване на импулса
Законът за запазване на импулса следва от уравнението $(∆p_(syst))↖(→)=F↖(→)∆t$. Ако върху системата не действат външни сили, тогава дясната страна на уравнението $(∆p_(syst))↖(→)=F↖(→)∆t$ става нула, което означава, че общият импулс на системата остава непроменен :
$(∆p_(syst))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
Нарича се система, върху която не действат външни сили или резултантната на външните сили е нула затворен.
Законът за запазване на импулса гласи:
Общият импулс на затворена система от тела остава постоянен при всяко взаимодействие на телата на системата едно с друго.
Полученият резултат е валиден за система, съдържаща произволен брой тела. Ако сумата на външните сили не е равна на нула, но сумата от техните проекции в някаква посока е равна на нула, тогава проекцията на импулса на системата в тази посока не се променя. Така например система от тела на повърхността на Земята не може да се счита за затворена поради силата на гравитацията, действаща върху всички тела, но сумата от проекциите на импулсите в хоризонталната посока може да остане непроменена (при отсъствие на триене), тъй като в тази посока силата на гравитацията не действа.
Реактивно задвижване
Нека разгледаме примери, които потвърждават валидността на закона за запазване на импулса.
Да вземем детска гумена топка, да я надуем и да я пуснем. Ще видим, че когато въздухът започне да го напуска в една посока, самата топка ще лети в другата. Движението на топка е пример за реактивно движение. Обяснява се със закона за запазване на импулса: общият импулс на системата „топка плюс въздух в нея“ преди изтичането на въздуха е нула; тя трябва да остане равна на нула по време на движение; следователно топката се движи в посока, обратна на посоката на движение на струята, и с такава скорост, че нейният импулс е равен по големина на импулса на въздушната струя.
Реактивно движениенаричаме движението на тяло, което възниква, когато част от него се отдели от него с произволна скорост. Поради закона за запазване на импулса посоката на движение на тялото е противоположна на посоката на движение на отделената част.
Ракетните полети се основават на принципа на реактивното задвижване. Модерната космическа ракета е много сложен самолет. Масата на ракетата се състои от масата на работния флуид (т.е. горещи газове, образувани в резултат на изгаряне на гориво и изпускани под формата на струен поток) и крайната или, както се казва, „суха“ маса на ракетата, останала след изхвърлянето на работната течност от ракетата.
Когато струя газ се изхвърля от ракета с висока скорост, самата ракета се втурва в обратната посока. Съгласно закона за запазване на импулса, импулсът $m_(p)υ_p$, придобит от ракетата, трябва да бъде равен на импулса $m_(gas)·υ_(gas)$ на изхвърлените газове:
$m_(p)υ_p=m_(газ)·υ_(газ)$
От това следва, че скоростта на ракетата
$υ_p=((m_(газ))/(m_p))·υ_(газ)$
От тази формула става ясно, че колкото по-голяма е скоростта на ракетата, толкова по-голяма е скоростта на изпусканите газове и съотношението на масата на работния флуид (т.е. масата на горивото) към крайната („суха“) масата на ракетата.
Формулата $υ_p=((m_(газ))/(m_p))·υ_(газ)$ е приблизителна. Не се отчита, че с изгарянето на горивото масата на летящата ракета става все по-малка. Точната формула за скоростта на ракетата е получена през 1897 г. от К. Е. Циолковски и носи неговото име.
Работа на силата
Терминът "работа" е въведен във физиката през 1826 г. от френския учен J. Poncelet. Ако в ежедневието работа се нарича само човешкият труд, то във физиката и по-специално в механиката е общоприето, че работата се извършва със сила. Физическото количество работа обикновено се обозначава с буквата $A$.
Работа на силатае мярка за действието на сила, в зависимост от нейната величина и посока, както и от движението на точката на приложение на силата. При постоянна сила и линейно преместване работата се определя от равенството:
$A=F|∆r↖(→)|cosα$
където $F$ е силата, действаща върху тялото, $∆r↖(→)$ е изместването, $α$ е ъгълът между силата и изместването.

Работата на силата е равна на произведението на модулите на силата и преместването и косинуса на ъгъла между тях, т.е. скаларното произведение на векторите $F↖(→)$ и $∆r↖(→)$.
Работата е скаларна величина. Ако $α 0$ и ако $90°
Когато върху едно тяло действат няколко сили, общата работа (сумата от работата на всички сили) е равна на работата на получената сила.
Единицата за работа в SI е джаул($1$ J). $1$ J е работата, извършена от сила от $1$ N по път от $1$ m в посоката на действие на тази сила. Тази единица е кръстена на английския учен Дж. Джаул (1818-1889): $1$ J = $1$ N $·$ м. Често се използват и килоджаули и милиджаули: $1$ kJ $= 1000$ J, $1$ mJ $ = $0,001 Дж.
Работа на гравитацията
Нека разгледаме плъзгащо се тяло по наклонена равнина с ъгъл на наклон $α$ и височина $H$.

Нека изразим $∆x$ чрез $H$ и $α$:
$∆x=(H)/(sinα)$
Като се има предвид, че силата на гравитацията $F_т=mg$ сключва ъгъл ($90° - α$) с посоката на движение, използвайки формулата $∆x=(H)/(sin)α$, получаваме израз за работа на гравитацията $A_g$:
$A_g=mg cos(90°-α) (H)/(sinα)=mgH$
От тази формула става ясно, че работата, извършена от гравитацията, зависи от височината и не зависи от ъгъла на наклона на равнината.
Следва, че:
- работата на гравитацията не зависи от формата на траекторията, по която се движи тялото, а само от началното и крайното положение на тялото;
- когато тялото се движи по затворена траектория, работата, извършена от гравитацията, е нула, т.е. гравитацията е консервативна сила (силите, които имат това свойство, се наричат консервативни).
Работа на силите за реакция, е равно на нула, тъй като силата на реакция ($N$) е насочена перпендикулярно на преместването $∆x$.
Работа на силата на триене
Силата на триене е насочена противоположно на преместването $∆x$ и сключва с него ъгъл $180°$, следователно работата на силата на триене е отрицателна:
$A_(tr)=F_(tr)∆x·cos180°=-F_(tr)·∆x$
Тъй като $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα),$ тогава
$A_(tr)=μmgHctgα$
Работа на еластичната сила
Нека външна сила $F↖(→)$ действа върху неразтегната пружина с дължина $l_0$, разтягайки я с $∆l_0=x_0$. В позиция $x=x_0F_(контрол)=kx_0$. След като силата $F↖(→)$ спре да действа в точката $x_0$, пружината се свива под действието на силата $F_(control)$.

Нека определим работата на еластичната сила, когато координатата на десния край на пружината се промени от $x_0$ на $x$. Тъй като еластичната сила в тази област се променя линейно, законът на Хук може да използва нейната средна стойност в тази област:
$F_(контролно ср.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
Тогава работата (като се вземе предвид факта, че посоките $(F_(control av.))↖(→)$ и $(∆x)↖(→)$ съвпадат) е равна на:
$A_(контрол)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
Може да се покаже, че формата на последната формула не зависи от ъгъла между $(F_(control av.))↖(→)$ и $(∆x)↖(→)$. Работата на еластичните сили зависи само от деформациите на пружината в началното и крайното състояние.
По този начин еластичната сила, подобно на силата на гравитацията, е консервативна сила.
Сила мощност
Мощността е физическа величина, измерена чрез съотношението на работата към периода от време, през който е произведена.
С други думи, мощността показва колко работа се извършва за единица време (в SI - за $1$ s).
Мощността се определя по формулата:
където $N$ е мощност, $A$ е извършена работа за време $∆t$.
Като заместим във формулата $N=(A)/(∆t)$ вместо произведението $A$ нейния израз $A=F|(∆r)↖(→)|cosα$, получаваме:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
Мощността е равна на произведението на величините на векторите на силата и скоростта и косинуса на ъгъла между тези вектори.
Мощността в системата SI се измерва във ватове (W). Един ват ($1$ W) е мощността, при която $1$ J работа се извършва за $1$ s: $1$ W $= 1$ J/s.
Тази единица е кръстена на английския изобретател J. Watt (Watt), който построи първата парна машина. Самият Дж. Уат (1736-1819) използва друга единица за мощност - конски сили (hp), която въвежда, за да може да сравни работата на парна машина и кон: $1$ к.с. $= 735,5$ W.
В техниката често се използват по-големи мощности - киловат и мегават: $1$ kW $= 1000$ W, $1$ MW $= 1000000$ W.
Кинетична енергия. Закон за изменение на кинетичната енергия
Ако едно тяло или няколко взаимодействащи тела (система от тела) могат да вършат работа, тогава се казва, че имат енергия.
Думата "енергия" (от гръцки energia - действие, дейност) често се използва в ежедневието. Например хората, които могат да вършат работа бързо, се наричат енергични, притежаващи голяма енергия.
Енергията, притежавана от тялото поради движение, се нарича кинетична енергия.
Както в случая с определението за енергия като цяло, можем да кажем за кинетичната енергия, че кинетичната енергия е способността на движещо се тяло да извършва работа.
Нека намерим кинетичната енергия на тяло с маса $m$, движещо се със скорост $υ$. Тъй като кинетичната енергия е енергия, дължаща се на движение, нейното нулево състояние е състоянието, в което тялото е в покой. След като намерим работата, необходима за придаване на дадена скорост на тялото, ще намерим неговата кинетична енергия.
За да направите това, нека изчислим работата в зоната на изместване $∆r↖(→)$, когато посоките на векторите на силата $F↖(→)$ и изместването $∆r↖(→)$ съвпадат. В този случай работата е равна
където $∆x=∆r$

За движението на точка с ускорение $α=const$ изразът за преместване има вида:
$∆x=υ_1t+(at^2)/(2),$
където $υ_1$ е началната скорост.
Замествайки в уравнението $A=F·∆x$ израза за $∆x$ от $∆x=υ_1t+(at^2)/(2)$ и използвайки втория закон на Нютон $F=ma$, получаваме:
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
Изразяване на ускорението чрез началната $υ_1$ и крайната $υ_2$ скорости $a=(υ_2-υ_1)/(t)$ и заместване в $A=ma(υ_1t+(at^2)/(2))=(mat )/ (2)(2υ_1+at)$ имаме:
$A=(m(υ_2-υ_1))/(2)·(2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
Сега приравнявайки началната скорост на нула: $υ_1=0$, получаваме израз за кинетична енергия:
$E_K=(mυ)/(2)=(p^2)/(2m)$
По този начин движещото се тяло има кинетична енергия. Тази енергия е равна на работата, която трябва да се извърши, за да се увеличи скоростта на тялото от нула до стойността $υ$.
От $E_K=(mυ)/(2)=(p^2)/(2m)$ следва, че работата, извършена от сила за преместване на тялото от една позиция в друга, е равна на промяната в кинетичната енергия:
$A=E_(K_2)-E_(K_1)=∆E_K$
Равенството $A=E_(K_2)-E_(K_1)=∆E_K$ изразява теорема за промяната на кинетичната енергия.
Промяна в кинетичната енергия на тялото(материална точка) за определен период от време е равна на работата, извършена през това време от силата, действаща върху тялото.
Потенциална енергия
Потенциалната енергия е енергията, определена от взаимното положение на взаимодействащи тела или части от едно и също тяло.
Тъй като енергията се определя като способността на тялото да извършва работа, потенциалната енергия естествено се определя като работата, извършена от сила, в зависимост само от относителното положение на телата. Това е работата на гравитацията $A=mgh_1-mgh_2=mgH$ и работата на еластичността:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
Потенциална енергия на тялотовзаимодействайки със Земята, те наричат количество, равно на произведението на масата $m$ на това тяло от ускорението на свободното падане $g$ и височината $h$ на тялото над повърхността на Земята:
Потенциалната енергия на еластично деформирано тяло е стойност, равна на половината от произведението на коефициента на еластичност (коравина) $k$ на тялото и квадрата на деформацията $∆l$:
$E_p=(1)/(2)k∆l^2$
Работата на консервативните сили (гравитация и еластичност), като се вземат предвид $E_p=mgh$ и $E_p=(1)/(2)k∆l^2$, се изразява, както следва:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
Тази формула ни позволява да дадем обща дефиниция на потенциалната енергия.
Потенциалната енергия на системата е величина, която зависи от положението на телата, промяната в която по време на прехода на системата от първоначалното състояние към крайното състояние е равна на работата на вътрешните консервативни сили на системата, взети с обратен знак.
Знакът минус от дясната страна на уравнението $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ означава, че когато работата се извършва от вътрешни сили ( например падане на тела върху земята под въздействието на гравитацията в системата „скала-Земя“), енергията на системата намалява. Работата и промените в потенциалната енергия в една система винаги имат противоположни знаци.
Тъй като работата определя само промяната в потенциалната енергия, тогава само промяната в енергията има физически смисъл в механиката. Следователно изборът на нулево енергийно ниво е произволен и се определя единствено от съображения за удобство, например лесното писане на съответните уравнения.
Закон за изменение и запазване на механичната енергия
Обща механична енергия на систематасумата от неговата кинетична и потенциална енергия се нарича:
Определя се от положението на телата (потенциална енергия) и тяхната скорост (кинетична енергия).
Според теоремата за кинетичната енергия,
$E_k-E_(k_1)=A_p+A_(pr),$
където $A_p$ е работата на потенциалните сили, $A_(pr)$ е работата на непотенциалните сили.
От своя страна работата на потенциалните сили е равна на разликата в потенциалната енергия на тялото в началното $E_(p_1)$ и крайното $E_p$ състояние. Като вземем това предвид, получаваме израз за закон за промяна на механичната енергия:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
където лявата страна на равенството е промяната в общата механична енергия, а дясната страна е работата на непотенциалните сили.
Така, закон за промяна на механичната енергиягласи:
Изменението на механичната енергия на системата е равно на работата на всички непотенциални сили.
Механична система, в която действат само потенциални сили, се нарича консервативна.
В консервативна система $A_(pr) = 0$. това предполага закон за запазване на механичната енергия:
В затворена консервативна система общата механична енергия се запазва (не се променя с времето):
$E_k+E_p=E_(k_1)+E_(p_1)$
Законът за запазване на механичната енергия произлиза от законите на механиката на Нютон, които са приложими към система от материални точки (или макрочастици).
Законът за запазване на механичната енергия обаче е валиден и за система от микрочастици, където самите закони на Нютон вече не са приложими.
Законът за запазване на механичната енергия е следствие от еднаквостта на времето.
Еднородност на времетое, че при едни и същи начални условия възникването на физически процеси не зависи от това в кой момент от времето са създадени тези условия.
Законът за запазване на общата механична енергия означава, че когато кинетичната енергия в една консервативна система се промени, нейната потенциална енергия също трябва да се промени, така че тяхната сума да остане постоянна. Това означава възможност за преобразуване на един вид енергия в друг.
В съответствие с различните форми на движение на материята те считат различни видовеенергия: механична, вътрешна (равна на сумата от кинетичната енергия на хаотичното движение на молекулите спрямо центъра на масата на тялото и потенциалната енергия на взаимодействие на молекулите една с друга), електромагнитна, химическа (която се състои от кинетичната енергия на движението на електроните и електрическата енергия на тяхното взаимодействие помежду си и с атомните ядра ), ядрени и др. От горното става ясно, че разделянето на енергията на различни видовеДоста условно.
Природните явления обикновено са придружени от трансформация на един вид енергия в друг. Например триенето на части от различни механизми води до превръщане на механичната енергия в топлина, т.е. вътрешна енергия.В топлинните двигатели, напротив, вътрешната енергия се преобразува в механична енергия; в галваничните клетки химическата енергия се преобразува в електрическа и т.н.
В момента понятието енергия е едно от основните понятия на физиката. Тази концепция е неразривно свързана с идеята за трансформацията на една форма на движение в друга.
Ето как се формулира понятието енергия в съвременната физика:
Енергията е обща количествена мярка за движение и взаимодействие на всички видове материя. Енергията не се появява от нищото и не изчезва, тя може само да преминава от една форма в друга. Концепцията за енергия свързва всички природни явления.
Прости механизми. Ефективност на механизма
Простите механизми са устройства, които променят големината или посоката на силите, приложени към тялото.
Те се използват за преместване или повдигане на големи товари с малко усилия. Те включват лоста и неговите разновидности - блокове (подвижни и неподвижни), порти, наклонена равнина и неговите разновидности - клин, винт и др.
Рамо на лоста. Правило за ливъридж
Лостът е твърдо тяло, което може да се върти около неподвижна опора.

Правилото за ливъридж гласи:
Лостът е в равновесие, ако силите, приложени към него, са обратно пропорционални на техните рамена:
$(F_2)/(F_1)=(l_1)/(l_2)$
От формулата $(F_2)/(F_1)=(l_1)/(l_2)$, прилагайки свойството на пропорцията към нея (произведението на крайните членове на пропорция е равно на произведението на нейните средни членове), ние може да се получи следната формула:
Но $F_1l_1=M_1$ е моментът на сила, стремяща се да завърти лоста по посока на часовниковата стрелка, а $F_2l_2=M_2$ е моментът на сила, опитваща се да завърти лоста обратно на часовниковата стрелка. Така $M_1=M_2$, което трябваше да се докаже.
Лостът започва да се използва от хората в древни времена. С негова помощ е било възможно повдигането на тежки каменни плочи по време на строителството на пирамиди в Древен Египет. Без ливъридж това не би било възможно. В края на краищата, например, за изграждането на пирамидата на Хеопс, чиято височина е $147$ m, са използвани повече от два милиона каменни блока, най-малкият от които тежи $2,5$ тона!
В наши дни лостовете се използват широко както в производството (например кранове), така и в ежедневието (ножици, резачки за тел, везни).
Фиксиран блок
Действието на неподвижен блок е подобно на действието на лост с равни рамена: $l_1=l_2=r$. Приложената сила $F_1$ е равна на товара $F_2$, а условието за равновесие е:
Фиксиран блокизползва се, когато трябва да промените посоката на сила, без да променяте нейната величина.
Подвижен блок
Движещият се блок действа подобно на лост, чиито рамена са: $l_2=(l_1)/(2)=r$. В този случай условието за равновесие има формата:
където $F_1$ е приложената сила, $F_2$ е натоварването. Използването на движещ се блок дава двойно увеличение на силата.
Подемник с макара (блокова система)

Конвенционалният верижен подемник се състои от $n$ движещи се и $n$ неподвижни блока. Използването му дава печалба в сила $2n$ пъти:
$F_1=(F_2)/(2n)$
Силов верижен подемниксе състои от n подвижни и един неподвижен блок. Използването на силов скрипец дава печалба в сила $2^n$ пъти:
$F_1=(F_2)/(2^n)$

Винт
Винтът е наклонена равнина, навита около ос.
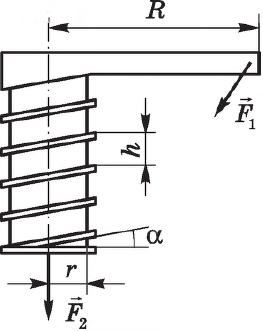
Условието за равновесие на силите, действащи върху витлото, има формата:
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

където $F_1$ е външната сила, приложена към витлото и действаща на разстояние $R$ от неговата ос; $F_2$ е силата, действаща по посока на оста на витлото; $h$ — стъпка на витлото; $r$ е средният радиус на резбата; $α$ е ъгълът на наклон на резбата. $R$ е дължината на лоста (гаечния ключ), въртящ винта със сила $F_1$.
Ефективност
Коефициент полезно действие(ефективност) - съотношението на полезна работа към цялата изразходвана работа.
Ефективността често се изразява като процент и се обозначава с гръцката буква $η$ („това“):
$η=(A_p)/(A_3)·100%$
където $A_n$ — полезна работа, $A_3$ е цялата изразходвана работа.
Полезната работа винаги представлява само част от общата работа, която човек изразходва, използвайки един или друг механизъм.
Част от извършената работа се изразходва за преодоляване на силите на триене. Тъй като $A_3 > A_n$, ефективността винаги е по-малка от $1$ (или $< 100%$).
Тъй като всяка от работите в това равенство може да се изрази като произведение на съответната сила и изминатото разстояние, то може да се пренапише по следния начин: $F_1s_1≈F_2s_2$.
Следва, че, печелейки с помощта на действащ механизъм, губим същия брой пъти по пътя и обратно. Този закон се нарича златното правило на механиката.
Златното правило на механиката е приблизителен закон, тъй като не отчита работата по преодоляване на триенето и гравитацията на частите на използваните устройства. Независимо от това, той може да бъде много полезен при анализиране на работата на всеки прост механизъм.

Така например, благодарение на това правило, можем веднага да кажем, че работникът, показан на фигурата, с двойно увеличение на силата на повдигане на товара с $10$ cm, ще трябва да свали противоположния край на лоста с $20 $ см.
Сблъсък на тела. Еластични и нееластични въздействия
Законите за запазване на импулса и механичната енергия се използват за решаване на проблема с движението на телата след сблъсък: от известните импулси и енергии преди сблъсъка се определят стойностите на тези количества след сблъсъка. Нека разгледаме случаите на еластични и нееластични удари.
Абсолютно нееластичен се нарича удар, след който телата образуват едно тяло, движещо се с определена скорост. Проблемът за скоростта на последното се решава с помощта на закона за запазване на импулса на система от тела с маси $m_1$ и $m_2$ (ако говорим за две тела) преди и след удара:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
Очевидно е, че кинетичната енергия на телата при нееластичен удар не се запазва (например за $(υ_1)↖(→)=-(υ_2)↖(→)$ и $m_1=m_2$ тя става равна на нула след удара).
Абсолютно еластично се нарича удар, при който се запазва не само сумата от импулси, но и сумата кинетични енергииудряне на тела.
За абсолютно еластично въздействие са валидни следните уравнения:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2) )^2)/(2)$
където $m_1, m_2$ са масите на топките, $υ_1, υ_2$ са скоростите на топките преди удара, $υ"_1, υ"_2$ са скоростите на топките след удара.
За потенциално силово поле можем да въведем концепцията за потенциална енергия като количество, характеризиращо „запаса от работа“, който материалната точка има в дадена точка от силовото поле. За да сравним тези „запаси от работа“ помежду си, трябва да се споразумеем за избора на нулевата точка О, при която условно ще приемем „запаса от работа“ за равен на нула (изборът на нулата точка, като всяка референтна точка, се прави произволно). Потенциалната енергия на материална точка в дадена позиция M е скаларната величина P, равна на работата, която полевите сили ще произведат при преместване на точката от позиция M до нула
От дефиницията следва, че потенциалната енергия P зависи от координатите x, y, z на точката M, т.е.
тоест потенциалната енергия във всяка точка на силовото поле е равна на стойността на силовата функция в тази точка, взета с обратен знак.
Това показва, че когато разглеждаме всички свойства на потенциално силово поле, вместо функцията на силата, можем да използваме концепцията за потенциална енергия. По-специално, работата на потенциалната сила, вместо равенството (57), може да се изчисли по формулата
Следователно работата на потенциална сила е равна на разликата в стойностите на потенциалната енергия на движеща се точка в нейните начални и крайни позиции.
Изрази на потенциалната енергия за известните ни потенциални силови полета могат да бъдат намерени от равенства (59) - (59”), като се има предвид, че . Така ще бъде:
1) за гравитационното поле (ос z вертикално нагоре)
2) за еластичното силово поле (линейно)
3) за гравитационното поле
![]()
Потенциалната енергия на система се определя по същия начин, както за една точка, а именно: потенциалната енергия P на механична система в нейното дадено положение е равна на работата, която полевите сили ще произведат при преместване на системата от дадена позиция до нула,
![]()
Ако има няколко полета (например полета на гравитация и еластичност), за всяко поле можете да вземете собствена нулева позиция.
Връзката между потенциалната енергия и силова функция ще бъде същата като за точка, т.е.
Закон за запазване на механичната енергия. Да приемем, че всички външни и вътрешни сили, действащи върху системата, са потенциални. Тогава
![]()
Замествайки този израз за работа в уравнение (50), получаваме за всяка позиция на системата: или
Следователно, когато се движи под въздействието на потенциални сили, сумата от кинетичните и потенциалните енергии на системата във всяка от нейните позиции остава постоянна. Това е законът за запазване на механичната енергия, който е частен случай на общия физичен закон за запазване на енергията.
Количеството се нарича обща механична енергия на системата, а самата механична система, за която законът е изпълнен, е консервативна система.
Пример. Нека разгледаме махало (фиг. 320), отклонено от вертикалата под ъгъл и пуснато без начална скорост. След това в първоначалното си положение, където P е теглото на махалото; z е координатата на неговия център на тежестта. Следователно, ако пренебрегнем всички съпротивления, тогава във всяка друга позиция ще има и двете

По този начин центърът на тежестта на махалото не може да се издигне над позицията. Когато махалото се спусне, неговата потенциална енергия намалява, а кинетичната енергия се увеличава, когато се издига, напротив, потенциалната му енергия се увеличава, а кинетичната енергия намалява.
От съставеното уравнение следва, че
По този начин ъгловата скорост на махалото във всеки момент зависи само от позицията, заета от неговия център на тежестта, и в тази позиция тя винаги приема една и съща стойност. Този вид зависимост възниква само при движение под въздействието на потенциални сили.
Дисипативни системи. Нека разгледаме механична система, която в допълнение към потенциалните сили е подложена на съпротивителни сили, които са неизбежни при земни условия (съпротивление на околната среда, външно и вътрешно триене). Тогава от уравнение (50) получаваме: или
къде е работата на съпротивителните сили. Тъй като съпротивителните сили са насочени срещу движението, стойността винаги е отрицателна.Следователно, когато разглежданата механична система се движи, се получава намаляване или, както се казва, разсейване (разсейване) на механичната енергия. Силите, които причиняват това разсейване, се наричат разсейващи сили, а механичната система, в която се получава разсейване на енергия, се нарича разсейваща система.
Например, за махалото, разгледано по-горе (фиг. 320), поради триене в оста и съпротивление на въздуха, механичната енергия ще намалее с течение на времето и нейните трептения ще изчезнат; това е дисипативна система.
Получените резултати не противоречат на общия закон за запазване на енергията, тъй като механичната енергия, загубена от дисипативна система, се превръща в други форми на енергия, например в топлина.
Въпреки това, дори при наличието на съпротивителни сили, механичната система може да не е разсейваща, ако загубената енергия се компенсира от приток на енергия отвън. Например, едно махало, както видяхме, ще бъде дисипативна система. Но в часовниковото махало загубата на енергия се компенсира от периодичен приток на енергия отвън поради понижаване на тежести или главна пружина и махалото ще извършва незатихващи трептения, наречени собствени трептения.
Собствените трептения се различават от принудителните трептения (виж § 96) по това, че не възникват под въздействието на зависеща от времето смущаваща сила и че тяхната амплитуда, честота и период се определят от свойствата на самата система (за принудени трептения, амплитудата, честотата и периодът зависят от смущаващата сила).
