Wszystkie wprowadzone wcześniej wielkości charakteryzowały się wyłącznie ruchem mechanicznym. Istnieje jednak wiele form ruchu materii i następuje ciągłe przejście od jednej formy ruchu do drugiej. Konieczne jest wprowadzenie wielkości fizycznej charakteryzującej ruch materii we wszystkich formach jej istnienia, za pomocą której możliwe byłoby ilościowe porównanie różnych form ruchu materii.
Energia- miara ruchu materii we wszystkich jej formach. Główną właściwością wszystkich rodzajów energii jest wzajemna konwersja. Rezerwa energii, jaką posiada ciało, określana jest przez maksymalną pracę, jaką ciało jest w stanie wykonać po całkowitym zużyciu energii. Energia jest liczbowo równa maksymalnej pracy, jaką może wykonać ciało i jest mierzona w tych samych jednostkach co praca. Kiedy energia przenosi się z jednego rodzaju na drugi, należy obliczyć energię ciała lub układu przed i po przejściu i obliczyć ich różnicę. Ta różnica jest zwykle nazywana praca: .
Zatem wielkość fizyczna charakteryzująca zdolność ciała do wykonania pracy nazywa się energią.
Energia mechaniczna ciała może być spowodowana ruchem ciała z określoną prędkością lub obecnością ciała w potencjalnym polu sił.
Energia kinetyczna.
Energię, którą ciało posiada w wyniku swojego ruchu, nazywamy kinetyczną. Praca wykonana nad ciałem jest równa przyrostowi jego energii kinetycznej. Znajdźmy tę pracę dla przypadku, gdy wypadkowa wszystkich sił przyłożonych do ciała jest równa .
Praca wykonana przez ciało pod wpływem energii kinetycznej jest równa utracie tej energii.
Energia potencjalna.
Jeżeli w każdym punkcie przestrzeni na ciało działają inne ciała z siłą, której wielkość może być różna w różnych punktach, mówimy, że ciało znajduje się w polu sił lub polu siłowym.
Jeżeli linie działania wszystkich tych sił przechodzą przez jeden punkt - środek pola siły - a wielkość siły zależy tylko od odległości do tego środka, wówczas siły takie nazywa się centralnymi, a pole takich sił zwane centralnym (grawitacyjne, pole elektryczne ładunku punktowego).
Pole sił, które jest stałe w czasie, nazywa się stacjonarnym.
Pole, w którym linie działania sił są równoległymi liniami prostymi, znajdującymi się w tej samej odległości od siebie, jest jednorodne.
Wszystkie siły w mechanice dzielą się na konserwatywne i niezachowawcze (lub rozpraszające).
Nazywa się siły, których praca nie zależy od kształtu trajektorii, ale jest określona jedynie przez początkowe i końcowe położenie ciała w przestrzeni konserwatywny.
Praca wykonana przez siły zachowawcze po zamkniętej ścieżce wynosi zero. Wszystkie siły centralne są konserwatywne. Siły odkształcenia sprężystego są również siłami zachowawczymi. Jeśli w polu działają tylko siły zachowawcze, pole to nazywa się potencjalnym (polem grawitacyjnym).
Siły, których praca zależy od kształtu toru, nazywane są niezachowawczymi (siłami tarcia).
Energia potencjalna jest częścią całkowitej energii mechanicznej układu, która jest określona jedynie przez względne położenie ciał tworzących układ oraz charakter sił interakcji między nimi. Energia potencjalna- jest to energia, którą posiadają ciała lub części ciała ze względu na ich względne położenie.
Pojęcie energii potencjalnej wprowadza się w następujący sposób. Jeżeli ciało znajduje się w potencjalnym polu sił (na przykład w polu grawitacyjnym Ziemi), każdemu punktowi tego pola można przypisać pewną funkcję (zwaną energią potencjalną), tak aby praca 12, wykonywana nad ciałem przez siły pola podczas jego przemieszczania się z dowolnej pozycji 1 do innej dowolnej pozycji 2, była równa zmniejszeniu się tej funkcji wzdłuż ścieżki 1®2:
gdzie i są wartościami energii potencjalnej układu w pozycjach 1 i 2.
Zapisana zależność pozwala nam wyznaczyć wartość energii potencjalnej aż do jakiejś nieznanej stałej addytywnej. Okoliczność ta nie ma jednak znaczenia, gdyż wszystkie zależności obejmują jedynie różnicę energii potencjalnych odpowiadających dwóm pozycjom ciała. W każdym konkretnym problemie przyjmuje się, że energia potencjalna określonego położenia ciała jest równa zeru, a energię innych położeń przyjmuje się w odniesieniu do poziomu zerowego. Konkretna postać funkcji zależy od charakteru pola siłowego i wyboru poziomu zerowego. Ponieważ poziom zerowy jest wybierany arbitralnie, może tak być wartości ujemne. Przykładowo, jeśli energię potencjalną ciała znajdującego się na powierzchni Ziemi przyjmiemy jako zero, to w polu grawitacyjnym w pobliżu powierzchni Ziemi energia potencjalna ciała o masie m podniesionego na wysokość h nad powierzchnię Ziemi jest równa do (ryc. 5).
gdzie jest ruch ciała pod wpływem grawitacji;
Energia potencjalna tego samego ciała leżącego na dnie otworu o głębokości H jest równa
W rozważanym przykładzie mówiliśmy o energii potencjalnej układu Ziemia-ciało.
Energię potencjalną może posiadać nie tylko układ oddziałujących ze sobą ciał, ale także pojedyncze ciało. W tym przypadku energia potencjalna zależy od względnego położenia części ciała.
Wyraźmy energię potencjalną ciała odkształconego sprężyście.
Energia potencjalna odkształcenia sprężystego, jeśli przyjmiemy, że energia potencjalna nieodkształconego ciała wynosi zero; k- współczynnik sprężystości, X- deformacja ciała.
Ogólnie rzecz biorąc, ciało może jednocześnie posiadać energię kinetyczną i potencjalną. Suma tych energii nazywa się całkowita energia mechaniczna ciało: .
Całkowita energia mechaniczna układu jest równa sumie jego energii kinetycznej i potencjalnej. Całkowita energia układu jest równa sumie wszystkich rodzajów energii, jakie posiada ten układ.
Prawo zachowania energii jest wynikiem uogólnienia wielu danych eksperymentalnych. Idea tego prawa należy do Łomonosowa, który nakreślił prawo zachowania materii i ruchu, a sformułowanie ilościowe podali niemiecki lekarz Mayer i przyrodnik Helmholtz.
Prawo zachowania energii mechanicznej: w polu wyłącznie sił zachowawczych całkowita energia mechaniczna pozostaje stała w izolowanym układzie ciał. Obecność sił rozpraszających (sił tarcia) prowadzi do rozproszenia (rozproszenia) energii, tj. zamianę jej na inne rodzaje energii i naruszenie prawa zachowania energii mechanicznej.
Prawo zachowania i transformacji energii całkowitej: całkowita energia izolowanego układu jest wielkością stałą.
Energia nigdy nie znika ani nie pojawia się ponownie, a jedynie przekształca się z jednego rodzaju w drugi w równoważnych ilościach. Na tym polega fizyczna istota prawa zachowania i transformacji energii: niezniszczalność materii i jej ruchu.
Energia jest najważniejszym pojęciem w mechanice. Co to jest energia? Definicji jest wiele, a oto jedna z nich.
Co to jest energia?
Energia to zdolność organizmu do wykonania pracy.
Rozważmy ciało, które poruszało się pod wpływem pewnych sił i zmieniało swoją prędkość z v 1 → do v 2 → . W tym przypadku siły działające na ciało wykonały pewną pracę A.
Praca wykonana przez wszystkie siły działające na ciało jest równa pracy wykonanej przez siłę wypadkową.
fa r → = fa 1 → + fa 2 →
ZA = fa 1 · s · sałata α 1 + fa 2 · s · sałata α 2 = fa р sałata α .
Ustalmy związek pomiędzy zmianą prędkości ciała a pracą wykonaną przez siły działające na ciało. Dla uproszczenia założymy, że na ciało działa pojedyncza siła F → skierowana wzdłuż linii prostej. Pod wpływem tej siły ciało porusza się ze stałym przyspieszeniem i po linii prostej. W tym przypadku wektory F → , v → , a → , s → pokrywają się pod względem kierunku i można je uznać za wielkości algebraiczne.
Praca wykonana przez siłę F → jest równa A = F s. Ruch ciała wyraża się wzorem s = v 2 2 - v 1 2 2 a. Stąd:
ZA = fa s = fa v 2 2 - v 1 2 2 a = m za v 2 2 - v 1 2 2 a
ZA = m v 2 2 - m v 1 2 2 = m v 2 2 2 - m v 1 2 2 .
Jak widzimy, praca wykonana przez tę siłę jest proporcjonalna do zmiany kwadratu prędkości ciała.
Definicja. Energia kinetyczna
Energia kinetyczna ciała jest równa połowie iloczynu masy ciała i kwadratu jego prędkości.
Energia kinetyczna to energia ruchu ciała. Przy zerowej prędkości jest zero.
Twierdzenie o energii kinetycznej
Wróćmy jeszcze raz do rozważanego przykładu i sformułujmy twierdzenie o energii kinetycznej ciała.
Twierdzenie o energii kinetycznej
Praca wykonana przez siłę przyłożoną do ciała jest równa zmianie energii kinetycznej ciała. To stwierdzenie jest prawdziwe również wtedy, gdy ciało porusza się pod wpływem siły zmieniającej wielkość i kierunek.
ZA = mi K. 2 - mi K. 1 .
Zatem energia kinetyczna ciała o masie m poruszającego się z prędkością v → jest równa pracy, jaką musi wykonać siła, aby przyspieszyć ciało do tej prędkości.
ZA = m v 2 2 = mi K.
Aby zatrzymać ciało, należy wykonać pracę
A = - m v 2 2 =- E K
Energia kinetyczna to energia ruchu. Oprócz energii kinetycznej istnieje również energia potencjalna, czyli energia oddziaływania między ciałami, która zależy od ich położenia.
Na przykład ciało unosi się nad powierzchnię ziemi. Im wyżej jest ona podniesiona, tym większa jest energia potencjalna. Kiedy ciało spada pod wpływem grawitacji, siła ta rzeczywiście działa. Co więcej, praca grawitacji zależy wyłącznie od pionowego ruchu ciała i nie zależy od trajektorii.

Ważny!
Generalnie o energii potencjalnej można mówić jedynie w kontekście tych sił, których praca nie zależy od kształtu toru ciała. Siły takie nazywane są konserwatywnymi.
Przykłady sił zachowawczych: grawitacja, siła sprężystości.
Kiedy ciało porusza się pionowo w górę, grawitacja wykonuje ujemną pracę.
Rozważmy przykład, w którym piłka przemieściła się z punktu o wysokości h 1 do punktu o wysokości h 2.

W tym przypadku siła ciężkości wykonała pracę równą
ZA = - m sol (godz. 2 - godz. 1) = - (m sol godz. 2 - m sol godz. 1) .
Praca ta jest równa zmianie m g h podjętej z przeciwnym znakiem.
Wartość E P = m g h jest energią potencjalną w polu grawitacyjnym. Na poziomie zerowym (na Ziemi) energia potencjalna ciała wynosi zero.
Definicja. Energia potencjalna
Energia potencjalna jest częścią całkowitej energii mechanicznej układu znajdującego się w polu sił zachowawczych. Energia potencjalna zależy od położenia punktów tworzących układ.
Możemy mówić o energii potencjalnej w polu grawitacji, energii potencjalnej ściśniętej sprężyny itp.
Praca wykonana przez grawitację jest równa zmianie energii potencjalnej wykonanej przy przeciwnym znaku.
ZA = - (E P 2 - E P 1) .
Oczywiste jest, że energia potencjalna zależy od wyboru poziomu zerowego (początku osi OY). Podkreślmy, że znaczenie fizyczne jest zmiana energię potencjalną ciał poruszających się względem siebie. Dla dowolnego wyboru poziomu zerowego zmiana energii potencjalnej będzie taka sama.
Obliczając ruch ciał w polu grawitacyjnym Ziemi, ale w znacznych odległościach od niego, należy wziąć pod uwagę prawo powszechnego ciążenia (zależność siły grawitacji od odległości do środka Ziemi) . Przedstawmy wzór wyrażający zależność energii potencjalnej ciała.
mi P = - sol m M r .
Tutaj G jest stałą grawitacji, M jest masą Ziemi.
Energia potencjalna wiosny
Wyobraźmy sobie, że w pierwszym przypadku wzięliśmy sprężynę i przedłużyliśmy ją o wielkość x. W drugim przypadku najpierw wydłużyliśmy sprężynę o 2x, a następnie zmniejszyliśmy ją o x. W obu przypadkach sprężyna została rozciągnięta o x, lecz dokonano tego na różne sposoby.
W tym przypadku praca wykonana przez siłę sprężystości przy zmianie długości sprężyny o x w obu przypadkach była taka sama i równa
ZA y p r = - ZA = - k x 2 2 .
Wielkość E y p = k x 2 2 nazywana jest energią potencjalną ściśniętej sprężyny. Jest ona równa pracy wykonanej przez siłę sprężystości podczas przejścia od danego stanu ciała do stanu o zerowym odkształceniu.
Jeśli zauważysz błąd w tekście, zaznacz go i naciśnij Ctrl+Enter
Ze względu na położenie w polu działania sił. Inna definicja: energia potencjalna jest funkcją współrzędnych, która jest terminem w Lagrangianie układu i opisuje wzajemne oddziaływanie elementów układu. Termin „energia potencjalna” został ukuty w XIX wieku przez szkockiego inżyniera i fizyka Williama Rankine’a.
Jednostką energii w układzie SI jest dżul.
Przyjmuje się, że energia potencjalna wynosi zero dla określonej konfiguracji ciał w przestrzeni, o której wyborze decyduje dogodność dalszych obliczeń. Proces wyboru tej konfiguracji nazywany jest normalizacją energii potencjalnej.
Prawidłową definicję energii potencjalnej można podać jedynie w polu sił, których praca zależy tylko od początkowego i końcowego położenia ciała, a nie od trajektorii jego ruchu. Siły takie nazywane są konserwatywnymi.
Energia potencjalna jest również cechą interakcji kilku ciał lub ciała i pola.
Każdy układ fizyczny dąży do stanu o najniższej energii potencjalnej.
Ściślej, energia kinetyczna to różnica między energią całkowitą układu a jego energią spoczynkową; zatem energia kinetyczna jest częścią całkowitej energii powstałej w wyniku ruchu.
Energia kinetyczna
Rozważmy układ składający się z jednej cząstki i napiszmy równanie ruchu:
Istnieje wypadkowa wszystkich sił działających na ciało. Pomnóżmy skalarnie równanie przez przemieszczenie cząstki. Biorąc to pod uwagę, otrzymujemy:
- moment bezwładności ciała
- prędkość kątowa ciała.
Prawo zachowania energii.
Prawo zachowania energii jest podstawowym prawem natury, ustalonym empirycznie, które stwierdza, że energia izolowanego (zamkniętego) układu fizycznego jest zachowywana w czasie. Innymi słowy, energia nie może powstać z niczego i nie może zniknąć w nicości, może jedynie przechodzić z jednej formy do drugiej.
Z fundamentalnego punktu widzenia, zgodnie z twierdzeniem Noether, prawo zachowania energii jest konsekwencją jednorodności czasu i w tym sensie jest uniwersalne, to znaczy właściwe dla układów o bardzo różnych naturach fizycznych. Innymi słowy, dla każdego konkretnego układu zamkniętego, niezależnie od jego charakteru, można wyznaczyć pewną wielkość zwaną energią, która będzie zachowana w czasie. Ponadto spełnienie tego prawa zachowania w każdym konkretnym systemie jest uzasadnione podporządkowaniem tego układu jego specyficznym prawom dynamiki, które na ogół są różne dla różnych układów.
Jednak w różnych gałęziach fizyki, ze względów historycznych, prawo zachowania energii jest formułowane odmiennie i dlatego mówi o zachowaniu różnych rodzajów energii. Na przykład w termodynamice prawo zachowania energii wyraża się jako pierwszą zasadę termodynamiki.
Ponieważ prawo zachowania energii nie dotyczy konkretnych wielkości i zjawisk, ale odzwierciedla ogólny wzór, który ma zastosowanie wszędzie i zawsze, bardziej słuszne jest nazywanie go nie prawem, ale zasadą zachowania energii.
Z matematycznego punktu widzenia zasada zachowania energii jest równoznaczna ze stwierdzeniem, że układ równań różniczkowych opisujących dynamikę danego układu fizycznego posiada pierwszą całkę ruchu związaną z
Impuls ciała
Pęd ciała jest wielkością równą iloczynowi masy ciała i jego prędkości.
Należy pamiętać, że mówimy o ciele, które można przedstawić jako punkt materialny. Pęd ciała ($p$) nazywany jest także pędem. Pojęcie pędu wprowadził do fizyki René Descartes (1596–1650). Termin „impuls” pojawił się później (impuls po łacinie oznacza „pchnięcie”). Pęd jest wielkością wektorową (podobnie jak prędkość) i wyraża się wzorem:
$p↖(→)=mυ↖(→)$
Kierunek wektora pędu zawsze pokrywa się z kierunkiem prędkości.
Jednostką impulsu w układzie SI jest impuls ciała o masie 1 $ kg poruszającego się z prędkością 1 $ m/s, zatem jednostką impulsu jest 1 $ kg $·$ m/s.
Jeżeli na ciało (punkt materialny) działa stała siła przez czas $∆t$, to przyspieszenie również będzie stałe:
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
gdzie $(υ_1)↖(→)$ i $(υ_2)↖(→)$ to prędkość początkowa i końcowa ciała. Podstawiając tę wartość do wyrażenia drugiego prawa Newtona, otrzymujemy:
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
Otwierając nawiasy i używając wyrażenia na pęd ciała, mamy:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
Tutaj $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ jest zmianą pędu w czasie $∆t$. Wtedy poprzednie równanie przyjmie postać:
$∆p↖(→)=F↖(→)∆t$
Wyrażenie $∆p↖(→)=F↖(→)∆t$ jest matematyczną reprezentacją drugiego prawa Newtona.
Nazywa się iloczynem siły i czasu jej działania impuls siły. Dlatego zmiana pędu punktu jest równa zmianie pędu działającej na niego siły.
Wyrażenie $∆p↖(→)=F↖(→)∆t$ nazywa się równanie ruchu ciała. Należy zauważyć, że to samo działanie – zmianę pędu punktu – można osiągnąć za pomocą małej siły w długim okresie czasu i dużej siły w krótkim czasie.
Impuls systemu tel. Prawo zmiany pędu
Impuls (wielkość ruchu) układu mechanicznego jest wektorem równym sumie impulsów wszystkich punktów materialnych tego układu:
$(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
Prawa zmiany i zachowania pędu są konsekwencją drugiego i trzeciego prawa Newtona.
Rozważmy układ składający się z dwóch ciał. Siły ($F_(12)$ i $F_(21)$ na rysunku, z którymi ciała układu oddziałują na siebie, nazywane są wewnętrznymi.
Niech oprócz sił wewnętrznych na układ działają siły zewnętrzne $(F_1)↖(→)$ i $(F_2)↖(→)$. Dla każdego ciała możemy zapisać równanie $∆p↖(→)=F↖(→)∆t$. Dodając lewą i prawą stronę tych równań, otrzymujemy:
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
Zgodnie z trzecim prawem Newtona $(F_(12))↖(→)=-(F_(21))↖(→)$.
Stąd,
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
Po lewej stronie znajduje się suma geometryczna zmian impulsów wszystkich ciał układu, równa zmianie impulsu samego układu - $(∆p_(syst))↖(→)$ Uwzględniając to rachunku, równość $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ można zapisać:
$(∆p_(syst))↖(→)=F↖(→)∆t$
gdzie $F↖(→)$ jest sumą wszystkich sił zewnętrznych działających na ciało. Uzyskany wynik oznacza, że pęd układu może zostać zmieniony jedynie przez siły zewnętrzne, a zmiana pędu układu jest skierowana w taki sam sposób, jak całkowita siła zewnętrzna. Na tym polega istota prawa zmiany pędu układu mechanicznego.
Siły wewnętrzne nie mogą zmienić całkowitego pędu układu. Zmieniają jedynie impulsy poszczególnych ciał układu.
Prawo zachowania pędu
Z równania $(∆p_(syst))↖(→)=F↖(→)∆t$ wynika prawo zachowania pędu. Jeżeli na układ nie działają żadne siły zewnętrzne, to prawa strona równania $(∆p_(syst))↖(→)=F↖(→)∆t$ przyjmuje wartość zerową, co oznacza, że całkowity pęd układu pozostaje niezmieniony :
$(∆p_(syst))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
Układ, na który nie działają żadne siły zewnętrzne lub wypadkowa sił zewnętrznych wynosi zero, nazywamy układem Zamknięte.
Prawo zachowania pędu stwierdza:
Całkowity pęd zamkniętego układu ciał pozostaje stały dla dowolnego oddziaływania ciał układu ze sobą.
Otrzymany wynik obowiązuje dla układu zawierającego dowolną liczbę ciał. Jeżeli suma sił zewnętrznych nie jest równa zeru, ale suma ich rzutów na jakiś kierunek jest równa zeru, to rzut pędu układu na ten kierunek nie ulega zmianie. Na przykład układu ciał na powierzchni Ziemi nie można uznać za zamknięty ze względu na siłę grawitacji działającą na wszystkie ciała, jednak suma rzutów impulsów w kierunku poziomym może pozostać niezmieniona (w przypadku braku tarcia), gdyż w tym kierunku nie działa siła ciężkości.
Napęd odrzutowy
Rozważmy przykłady potwierdzające słuszność prawa zachowania pędu.
Weźmy gumową piłkę dla dzieci, napompuj ją i puść. Zobaczymy, że gdy powietrze zacznie ją opuszczać w jednym kierunku, sama piłka poleci w drugim. Ruch piłki jest przykładem ruchu odrzutowego. Wyjaśnia to prawo zachowania pędu: całkowity pęd układu „kulka plus powietrze w nim” przed wypłynięciem powietrza wynosi zero; podczas ruchu musi pozostać równy zeru; dlatego kula porusza się w kierunku przeciwnym do kierunku przepływu strumienia i z taką prędkością, że jej pęd jest równy pędowi strumienia powietrza.
Ruch odrzutowy nazywamy ruchem ciała zachodzącym, gdy jego część zostanie oddzielona od niego z dowolną prędkością. Ze względu na prawo zachowania pędu kierunek ruchu ciała jest przeciwny do kierunku ruchu oddzielonej części.
Loty rakietowe opierają się na zasadzie napędu odrzutowego. Nowoczesna rakieta kosmiczna to bardzo złożony statek powietrzny. Na masę rakiety składa się masa płynu roboczego (czyli gorących gazów powstających w wyniku spalania paliwa i emitowanych w postaci strumienia odrzutowego) oraz końcowej, czyli jak to się mówi, „suchej” masy rakiety. rakieta pozostała po wyrzuceniu płynu roboczego z rakiety.
Kiedy strumień gazu zostaje wyrzucony z rakiety z dużą prędkością, sama rakieta pędzi w przeciwnym kierunku. Zgodnie z prawem zachowania pędu pęd $m_(p)υ_p$ uzyskany przez rakietę musi być równy pędowi $m_(gaz)·υ_(gaz)$ wyrzuconych gazów:
$m_(p)υ_p=m_(gaz)·υ_(gaz)$
Wynika z tego, że prędkość rakiety
$υ_p=((m_(gaz))/(m_p))·υ_(gaz)$
Z tego wzoru jasno wynika, że im większa prędkość rakiety, tym większa prędkość emitowanych gazów i stosunek masy płynu roboczego (tj. masy paliwa) do końcowej („suchej”) masa rakiety.
Wzór $υ_p=((m_(gaz))/(m_p))·υ_(gaz)$ jest przybliżony. Nie bierze się pod uwagę, że w miarę spalania paliwa masa lecącej rakiety staje się coraz mniejsza. Dokładny wzór na prędkość rakiety uzyskał w 1897 roku K. E. Ciołkowski i nosi jego imię.
Praca siły
Termin „praca” wprowadził do fizyki w 1826 roku francuski naukowiec J. Poncelet. Jeśli w życiu codziennym pracą nazywa się tylko pracę ludzką, to w fizyce, a zwłaszcza w mechanice, powszechnie przyjmuje się, że praca jest wykonywana siłą. Fizyczna ilość pracy jest zwykle oznaczana literą $A$.
Praca siły jest miarą działania siły, zależnej od jej wielkości i kierunku, a także od ruchu punktu przyłożenia siły. Dla stałej siły i przemieszczenia liniowego praca jest określona przez równość:
$A=F|∆r↖(→)|cosα$
gdzie $F$ to siła działająca na ciało, $∆r↖(→)$ to przemieszczenie, $α$ to kąt pomiędzy siłą a przemieszczeniem.

Praca siły jest równa iloczynowi modułów siły i przemieszczenia oraz cosinusowi kąta między nimi, czyli iloczynowi skalarnemu wektorów $F↖(→)$ i $∆r↖(→)$.
Praca jest wielkością skalarną. Jeśli $α wynosi 0 $, a jeśli $90°
Gdy na ciało działa kilka sił, praca całkowita (suma pracy wszystkich sił) jest równa pracy powstałej siły.
Jednostką pracy w SI jest dżul(1 $ J). $1$ J to praca wykonana przez siłę 1$ N po drodze o długości 1$ m w kierunku działania tej siły. Jednostka ta została nazwana na cześć angielskiego naukowca J. Joule'a (1818-1889): $1$ J = $1$ N $·$ m. Często używane są także kilodżule i milidżule: $1$ kJ $= 1000$ J, $1$ mJ $ = 0,001 J.
Praca grawitacji
Rozważmy ciało ślizgające się po pochyłej płaszczyźnie o kącie nachylenia $α$ i wysokości $H$.

Wyraźmy $∆x$ w postaci $H$ i $α$:
$∆x=(H)/(sinα)$
Biorąc pod uwagę, że siła ciężkości $F_т=mg$ tworzy kąt ($90° - α$) z kierunkiem ruchu, korzystając ze wzoru $∆x=(H)/(sin)α$, otrzymujemy wyrażenie na praca ciężkości $A_g$:
$A_g=mg cos(90°-α) (H)/(sinα)=mgH$
Z tego wzoru jasno wynika, że praca wykonana przez grawitację zależy od wysokości i nie zależy od kąta nachylenia płaszczyzny.
Wynika, że:
- działanie grawitacji nie zależy od kształtu toru, po którym porusza się ciało, ale jedynie od początkowego i końcowego położenia ciała;
- gdy ciało porusza się po zamkniętej trajektorii, praca wykonana przez grawitację wynosi zero, tj. grawitacja jest siłą zachowawczą (siły posiadające tę właściwość nazywane są zachowawczymi).
Praca sił reakcji, jest równa zeru, ponieważ siła reakcji ($N$) jest skierowana prostopadle do przemieszczenia $∆x$.
Praca siły tarcia
Siła tarcia jest skierowana przeciwnie do przemieszczenia $∆x$ i tworzy z nią kąt $180°$, zatem praca siły tarcia jest ujemna:
$A_(tr)=F_(tr)∆x·cos180°=-F_(tr)·∆x$
Ponieważ $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα),$ to
$A_(tr)=μmgHctgα$
Praca siły sprężystej
Niech zewnętrzna siła $F↖(→)$ działa na nierozciągniętą sprężynę o długości $l_0$, rozciągając ją o $∆l_0=x_0$. Na pozycji $x=x_0F_(kontrola)=kx_0$. Gdy siła $F↖(→)$ przestanie działać w punkcie $x_0$, sprężyna zostaje ściśnięta pod działaniem siły $F_(control)$.

Wyznaczmy pracę siły sprężystości, gdy współrzędna prawego końca sprężyny zmienia się z $x_0$ na $x$. Ponieważ siła sprężystości w tym obszarze zmienia się liniowo, prawo Hooke’a może wykorzystać jej średnią wartość w tym obszarze:
$F_(średnia kontrolna)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
Wtedy praca (biorąc pod uwagę fakt, że kierunki $(F_(śr.kontrolna))↖(→)$ i $(∆x)↖(→)$ pokrywają się) jest równa:
$A_(kontrola)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
Można wykazać, że postać ostatniego wzoru nie zależy od kąta zawartego pomiędzy $(F_(śr.kontrolna))↖(→)$ a $(∆x)↖(→)$. Praca sił sprężystych zależy jedynie od odkształceń sprężyny w stanie początkowym i końcowym.
Zatem siła sprężystości, podobnie jak siła grawitacji, jest siłą zachowawczą.
Moc mocy
Moc jest wielkością fizyczną mierzoną stosunkiem pracy do czasu, w którym jest ona wykonana.
Inaczej mówiąc, moc pokazuje, ile pracy wykonano w jednostce czasu (w SI – na 1$ s).
Moc określa się według wzoru:
gdzie $N$ to moc, $A$ to praca wykonana w czasie $∆t$.
Podstawiając do wzoru $N=(A)/(∆t)$ zamiast pracy $A$ wyrażenie $A=F|(∆r)↖(→)|cosα$ otrzymujemy:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
Moc jest równa iloczynowi wartości wektorów siły i prędkości oraz cosinusa kąta między tymi wektorami.
Moc w układzie SI mierzona jest w watach (W). Jeden wat (1 $ W) to moc, przy której 1 $ J pracy jest wykonywane przez 1 $ s: 1 $ W $ = 1 $ J/s.
Jednostka ta nosi imię angielskiego wynalazcy J. Watta (Watt), który zbudował pierwszy silnik parowy. Sam J. Watt (1736-1819) używał innej jednostki mocy - koni mechanicznych (KM), którą wprowadził, aby móc porównać osiągi maszyny parowej i konia: 1 $ KM. $= 735,5 $ W.
W technologii często stosuje się większe jednostki napędowe - kilowat i megawat: 1 $ kW $ = 1000 $ W, 1 $ MW $ = 1000000 $ W.
Energia kinetyczna. Prawo zmiany energii kinetycznej
Jeżeli ciało lub kilka oddziałujących na siebie ciał (układ ciał) może wykonać pracę, to mówi się, że mają one energię.
Słowo „energia” (od greckiego energia – działanie, aktywność) jest często używane w życiu codziennym. Na przykład osoby, które potrafią szybko wykonać pracę, nazywane są energicznymi, mającymi wielką energię.
Energię posiadaną przez ciało w wyniku ruchu nazywamy energią kinetyczną.
Podobnie jak w przypadku definicji energii w ogóle, o energii kinetycznej można powiedzieć, że energia kinetyczna to zdolność poruszającego się ciała do wykonania pracy.
Znajdźmy energię kinetyczną ciała o masie $m$ poruszającego się z prędkością $υ$. Ponieważ energia kinetyczna jest energią wynikającą z ruchu, jej stan zerowy to stan, w którym ciało znajduje się w spoczynku. Znalezwszy pracę niezbędną do nadania ciału danej prędkości, znajdziemy jego energię kinetyczną.
W tym celu obliczmy pracę w obszarze przemieszczenia $∆r↖(→)$, gdy kierunki wektorów siły $F↖(→)$ i przemieszczenia $∆r↖(→)$ pokrywają się. W tym przypadku praca jest równa
gdzie $∆x=∆r$

Dla ruchu punktu z przyspieszeniem $α=const$ wyrażenie na przemieszczenie ma postać:
$∆x=υ_1t+(at^2)/(2),$
gdzie $υ_1$ to prędkość początkowa.
Podstawiając do równania $A=F·∆x$ wyrażenie na $∆x$ z $∆x=υ_1t+(at^2)/(2)$ i korzystając z drugiego prawa Newtona $F=ma$ otrzymujemy:
$A=ma(υ_1t+(at^2)/(2))=(mata)/(2)(2υ_1+at)$
Wyrażając przyspieszenie poprzez prędkość początkową $υ_1$ i końcową $υ_2$ $a=(υ_2-υ_1)/(t)$ i podstawiając do $A=ma(υ_1t+(at^2)/(2))=(mat )/ (2)(2υ_1+at)$ mamy:
$A=(m(υ_2-υ_1))/(2)·(2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
Teraz przyrównując prędkość początkową do zera: $υ_1=0$, otrzymujemy wyrażenie na energia kinetyczna:
$E_K=(mυ)/(2)=(p^2)/(2m)$
Zatem poruszające się ciało ma energię kinetyczną. Energia ta jest równa pracy, jaką należy wykonać, aby zwiększyć prędkość ciała od zera do wartości $υ$.
Z $E_K=(mυ)/(2)=(p^2)/(2m)$ wynika, że praca wykonana przez siłę podczas przemieszczania ciała z jednego położenia do drugiego jest równa zmianie energii kinetycznej:
$A=E_(K_2)-E_(K_1)=∆E_K$
Równość $A=E_(K_2)-E_(K_1)=∆E_K$ wyraża twierdzenie o zmianie energii kinetycznej.
Zmiana energii kinetycznej ciała(punkt materialny) przez pewien okres czasu jest równa pracy wykonanej w tym czasie przez siłę działającą na ciało.
Energia potencjalna
Energia potencjalna to energia określona przez względne położenie oddziałujących ciał lub części tego samego ciała.
Ponieważ energię definiuje się jako zdolność ciała do wykonania pracy, energię potencjalną definiuje się naturalnie jako pracę wykonaną przez siłę, zależną jedynie od względnego położenia ciał. To jest praca grawitacji $A=mgh_1-mgh_2=mgH$ i praca sprężystości:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
Energia potencjalna ciała oddziałując z Ziemią, nazywają wielkość równą iloczynowi masy $m$ tego ciała przez przyspieszenie swobodnego spadania $g$ i wysokość $h$ ciała nad powierzchnią Ziemi:
Energia potencjalna ciała odkształconego sprężyście jest wartością równą połowie iloczynu współczynnika sprężystości (sztywności) $k$ ciała i kwadratu odkształcenia $∆l$:
$E_p=(1)/(2)k∆l^2$
Praca sił zachowawczych (grawitacji i sprężystości), biorąc pod uwagę $E_p=mgh$ i $E_p=(1)/(2)k∆l^2$, wyraża się następująco:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
Wzór ten pozwala nam podać ogólną definicję energii potencjalnej.
Energia potencjalna układu to wielkość zależna od położenia ciał, zmiana, w której podczas przejścia układu ze stanu początkowego do stanu końcowego jest równa pracy wewnętrznych sił zachowawczych układu, zrobione z przeciwnym znakiem.
Znak minus po prawej stronie równania $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ oznacza, że gdy pracę wykonują siły wewnętrzne ( na przykład spadające ciała na ziemię pod wpływem grawitacji w układzie „skała-Ziemia”), energia układu maleje. Praca i zmiany energii potencjalnej w układzie mają zawsze przeciwne znaki.
Ponieważ praca wyznacza jedynie zmianę energii potencjalnej, to w mechanice znaczenie fizyczne ma jedynie zmiana energii. Dlatego wybór zerowego poziomu energii jest arbitralny i podyktowany wyłącznie względami wygody, na przykład łatwością pisania odpowiednich równań.
Prawo zmiany i zachowania energii mechanicznej
Całkowita energia mechaniczna układu suma jego energii kinetycznej i potencjalnej nazywa się:
Decyduje o tym położenie ciał (energia potencjalna) i ich prędkość (energia kinetyczna).
Zgodnie z twierdzeniem o energii kinetycznej,
$E_k-E_(k_1)=A_p+A_(pr),$
gdzie $A_p$ jest pracą sił potencjalnych, $A_(pr)$ jest pracą sił niepotencjalnych.
Z kolei praca sił potencjalnych jest równa różnicy energii potencjalnej ciała w stanie początkowym $E_(p_1)$ i końcowym $E_p$. Biorąc to pod uwagę, otrzymujemy wyrażenie dla prawo zmiany energii mechanicznej:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
gdzie lewa strona równości to zmiana całkowitej energii mechanicznej, a prawa strona to praca sił niepotencjalnych.
Więc, prawo zmiany energii mechanicznej czyta:
Zmiana energii mechanicznej układu jest równa pracy wszystkich sił niepotencjalnych.
Układ mechaniczny, w którym działają tylko siły potencjalne, nazywa się konserwatywnym.
W systemie konserwatywnym $A_(pr) = 0$. to oznacza prawo zachowania energii mechanicznej:
W zamkniętym układzie konserwatywnym całkowita energia mechaniczna jest zachowana (nie zmienia się w czasie):
$E_k+E_p=E_(k_1)+E_(p_1)$
Prawo zachowania energii mechanicznej wywodzi się z praw mechaniki Newtona, które mają zastosowanie do układu punktów materialnych (czyli makrocząstek).
Jednak zasada zachowania energii mechanicznej obowiązuje również w przypadku układu mikrocząstek, w którym same prawa Newtona już nie obowiązują.
Prawo zachowania energii mechanicznej jest konsekwencją jednolitości czasu.
Jednolitość czasu polega na tym, że w tych samych warunkach początkowych wystąpienie procesów fizycznych nie zależy od tego, w którym momencie te warunki zostaną utworzone.
Prawo zachowania całkowitej energii mechanicznej oznacza, że gdy w układzie zachowawczym zmienia się energia kinetyczna, musi się także zmieniać jej energia potencjalna, tak aby ich suma pozostała stała. Oznacza to możliwość zamiany jednego rodzaju energii na inny.
Uważają, że zgodnie z różnymi formami ruchu materii Różne rodzaje energia: mechaniczna, wewnętrzna (równa sumie energii kinetycznej chaotycznego ruchu cząsteczek względem środka masy ciała i energii potencjalnej wzajemnego oddziaływania cząsteczek), elektromagnetyczna, chemiczna (na którą składa się energia kinetyczna ruchu elektronów i energia elektryczna ich interakcji ze sobą oraz z jądrami atomowymi ), jądrowy itp. Z powyższego jasno wynika, że podział energii na różne rodzaje dość warunkowe.
Zjawiskom naturalnym towarzyszy zwykle przemiana jednego rodzaju energii w inny. Na przykład tarcie części różnych mechanizmów prowadzi do zamiany energii mechanicznej na ciepło, tj. energia wewnętrzna. Przeciwnie, w silnikach cieplnych energia wewnętrzna zamieniana jest na energię mechaniczną; w ogniwach galwanicznych energia chemiczna jest przekształcana w energię elektryczną itp.
Obecnie pojęcie energii jest jednym z podstawowych pojęć fizyki. Koncepcja ta nierozerwalnie wiąże się z ideą transformacji jednej formy ruchu w drugą.
Oto jak pojęcie energii jest formułowane we współczesnej fizyce:
Energia jest ogólną ilościową miarą ruchu i interakcji wszystkich rodzajów materii. Energia nie pojawia się z niczego i nie znika, może jedynie przechodzić z jednej formy w drugą. Pojęcie energii łączy w sobie wszystkie zjawiska naturalne.
Proste mechanizmy. Sprawność mechanizmu
Mechanizmy proste to urządzenia zmieniające wielkość lub kierunek sił przyłożonych do ciała.
Służą do przenoszenia lub podnoszenia dużych ładunków przy niewielkim wysiłku. Należą do nich dźwignia i jej odmiany - bloki (ruchome i stałe), bramy, płaszczyzna pochyła i jej odmiany - klin, śruba itp.
Ramię dźwigni. Zasada dźwigni
Dźwignia to sztywny korpus, który może obracać się wokół nieruchomego wspornika.

Zasada dźwigni mówi:
Dźwignia znajduje się w równowadze, jeśli przyłożone do niej siły są odwrotnie proporcjonalne do ich ramion:
$(F_2)/(F_1)=(l_1)/(l_2)$
Ze wzoru $(F_2)/(F_1)=(l_1)/(l_2)$, stosując do niego właściwość proporcji (iloczyn skrajnych wyrazów proporcji jest równy iloczynowi jej środkowych wyrazów) można uzyskać następujący wzór:
Ale $F_1l_1=M_1$ to moment siły zmierzający do obrócenia dźwigni w kierunku zgodnym z ruchem wskazówek zegara, a $F_2l_2=M_2$ to moment siły próbujący obrócić dźwignię w kierunku przeciwnym do ruchu wskazówek zegara. Zatem $M_1=M_2$, co należało udowodnić.
Dźwignia zaczęła być używana przez ludzi w czasach starożytnych. Za jego pomocą można było podnosić ciężkie kamienne płyty podczas budowy piramid w starożytnym Egipcie. Bez dźwigni nie byłoby to możliwe. Przecież na przykład do budowy piramidy Cheopsa, która ma wysokość 147 dolarów, zużyto ponad dwa miliony kamiennych bloków, z których najmniejszy ważył 2,5 tony dolarów!
Obecnie dźwignie są szeroko stosowane zarówno w produkcji (na przykład dźwigi), jak i w życiu codziennym (nożyczki, przecinaki do drutu, wagi).
Naprawiono blok
Działanie nieruchomego klocka jest podobne do działania dźwigni o równych ramionach: $l_1=l_2=r$. Przyłożona siła $F_1$ jest równa obciążeniu $F_2$, a warunek równowagi jest następujący:
Naprawiono blok używane, gdy trzeba zmienić kierunek siły bez zmiany jej wielkości.
Ruchomy blok
Poruszający się klocek działa podobnie do dźwigni, której ramiona wynoszą: $l_2=(l_1)/(2)=r$. W tym przypadku warunek równowagi ma postać:
gdzie $F_1$ to przyłożona siła, $F_2$ to obciążenie. Zastosowanie ruchomego bloku daje podwójny przyrost siły.
Wciągnik wielokrążkowy (system blokowy)

Konwencjonalny wciągnik łańcuchowy składa się z n$ ruchomych i $n$ stałych bloków. Użycie go daje wzrost siły 2n$ razy:
$F_1=(F_2)/(2n)$
Wciągnik łańcuchowy składa się z n ruchomego i jednego nieruchomego bloku. Użycie koła pasowego daje wzrost siły 2^n$ razy:
$F_1=(F_2)/(2^n)$

Śruba
Śruba jest nachyloną płaszczyzną owiniętą wokół osi.
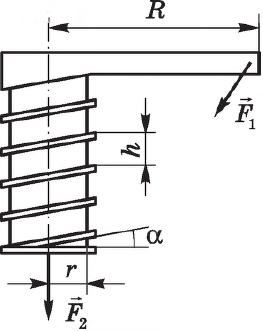
Warunek równowagi sił działających na śmigło ma postać:
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

gdzie $F_1$ jest siłą zewnętrzną przyłożoną do śruby i działającą w odległości $R$ od jej osi; $F_2$ jest siłą działającą w kierunku osi śmigła; $h$ — skok śmigła; $r$ to średni promień gwintu; $α$ jest kątem nachylenia gwintu. $R$ to długość dźwigni (klucza) obracającej śrubę z siłą $F_1$.
Efektywność
Współczynnik przydatna akcja(efektywność) - stosunek pracy użytecznej do całej pracy wydanej.
Wydajność jest często wyrażana w procentach i jest oznaczona grecką literą $η$ („to”):
$η=(A_п)/(A_3)·100%$
gdzie $A_n$ — pożyteczna praca, $A_3$ to cała wykonana praca.
Przydatna praca zawsze stanowi tylko część całkowitej pracy, jaką dana osoba wykonuje, korzystając z tego lub innego mechanizmu.
Część wykonanej pracy jest przeznaczona na pokonanie sił tarcia. Ponieważ $A_3 > A_n$, wydajność jest zawsze mniejsza niż 1$ (lub $< 100%$).
Ponieważ każdą pracę w tej równości można wyrazić jako iloczyn odpowiedniej siły i przebytej drogi, można ją przepisać w następujący sposób: $F_1s_1≈F_2s_2$.
Wynika, że, wygrywając za pomocą obowiązującego mechanizmu, po drodze przegrywamy tyle samo razy i odwrotnie. Prawo to nazywa się złotą zasadą mechaniki.
Złota zasada mechaniki jest prawem przybliżonym, ponieważ nie uwzględnia pracy polegającej na pokonywaniu tarcia i grawitacji części używanych urządzeń. Niemniej jednak może być bardzo przydatny w analizie działania dowolnego prostego mechanizmu.

I tak np. dzięki tej regule od razu możemy powiedzieć, że pokazany na rysunku robotnik przy podwójnym wzmocnieniu siły podnoszenia ładunku o 10$cm będzie musiał opuścić przeciwny koniec dźwigni o 20$ $cm.
Zderzenie ciał. Uderzenia elastyczne i niesprężyste
Prawa zachowania pędu i energii mechanicznej służą do rozwiązania problemu ruchu ciał po zderzeniu: ze znanych impulsów i energii przed zderzeniem wyznaczane są wartości tych wielkości po zderzeniu. Rozważmy przypadki uderzeń sprężystych i niesprężystych.
Uderzenie nazywa się absolutnie niesprężystym, po którym ciała tworzą jedno ciało poruszające się z określoną prędkością. Problem prędkości tego ostatniego rozwiązuje się korzystając z prawa zachowania pędu układu ciał o masach $m_1$ i $m_2$ (jeśli mówimy o dwóch ciałach) przed i po zderzeniu:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
Jest oczywiste, że energia kinetyczna ciał podczas uderzenia niesprężystego nie jest zachowana (przykładowo dla $(υ_1)↖(→)=-(υ_2)↖(→)$ i $m_1=m_2$ staje się równa zero po uderzeniu).
Uderzenie nazywa się absolutnie sprężystym, w którym zachowana jest nie tylko suma impulsów, ale także suma energie kinetyczne uderzanie w ciała.
Dla uderzenia absolutnie sprężystego obowiązują następujące równania:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2 )^2)/(2)$
gdzie $m_1, m_2$ to masy piłek, $υ_1, υ_2$ to prędkości piłek przed uderzeniem, $υ"_1, υ"_2$ to prędkości piłek po uderzeniu.
Dla potencjalnego pola siłowego możemy wprowadzić pojęcie energii potencjalnej jako wielkości charakteryzującej „rezerwę pracy”, jaką posiada punkt materialny w danym punkcie pola siłowego. Aby porównać te „rezerwy pracy” ze sobą, musimy zgodzić się na wybór punktu zerowego O, w którym warunkowo uznamy „rezerwę pracy” za równą zeru (wybór punktu zerowego punkt odniesienia, jak każdy punkt odniesienia, wyznaczany jest dowolnie). Energia potencjalna punktu materialnego w danym położeniu M jest wielkością skalarną P, równą pracy, jaką wykonają siły pola podczas przesuwania punktu z położenia M do zera
Z definicji wynika, że energia potencjalna P zależy od współrzędnych x, y, z punktu M, czyli że
to znaczy energia potencjalna w dowolnym punkcie pola siłowego jest równa wartości funkcji siły w tym punkcie, przyjętej z przeciwnym znakiem.
Pokazuje to, że rozważając wszystkie właściwości potencjalnego pola siłowego, zamiast funkcji siły, możemy posłużyć się pojęciem energii potencjalnej. W szczególności pracę siły potencjalnej zamiast równości (57) można obliczyć za pomocą wzoru
W konsekwencji praca siły potencjalnej jest równa różnicy wartości energii potencjalnej poruszającego się punktu w jego położeniu początkowym i końcowym.
Wyrażenia energii potencjalnej dla znanych nam potencjalnych pól sił można znaleźć z równości (59) - (59”), biorąc pod uwagę, że . Więc będzie:
1) dla pola grawitacyjnego (oś z pionowo w górę)
2) dla sprężystego pola siłowego (liniowe)
3) dla pola grawitacyjnego
![]()
Energię potencjalną układu wyznacza się analogicznie jak dla jednego punktu, a mianowicie: energia potencjalna P układu mechanicznego w jego danym położeniu jest równa pracy, jaką wykonają siły pola podczas przemieszczania układu z danego położenia do zera,
![]()
Jeśli istnieje kilka pól (na przykład pola grawitacji i sprężystości), dla każdego pola można przyjąć własną pozycję zerową.
Zależność pomiędzy energią potencjalną a funkcją siły będzie taka sama jak dla punktu, tj.
Prawo zachowania energii mechanicznej. Załóżmy, że wszystkie siły zewnętrzne i wewnętrzne działające na układ są potencjalne. Następnie
![]()
Podstawiając to wyrażenie pracy do równania (50), otrzymujemy dla dowolnego położenia układu: lub
W konsekwencji, poruszając się pod wpływem sił potencjalnych, suma energii kinetycznej i potencjalnej układu w każdym z jego położeń pozostaje stała. Jest to prawo zachowania energii mechanicznej, które jest szczególnym przypadkiem ogólnego fizycznego prawa zachowania energii.
Wielkość ta nazywana jest całkowitą energią mechaniczną układu, a sam układ mechaniczny, dla którego spełnione jest to prawo, jest układem zachowawczym.
Przykład. Rozważmy wahadło (ryc. 320), odchylone od pionu o kąt i wypuszczone bez prędkości początkowej. Następnie w położeniu początkowym, gdzie P jest ciężarem wahadła; z jest współrzędną jego środka ciężkości. Dlatego jeśli zaniedbamy wszystkie opory, to w każdym innym położeniu będzie jeden i drugi

Zatem środek ciężkości wahadła nie może wznieść się powyżej położenia. Gdy wahadło jest opuszczone, jego energia potencjalna maleje, a energia kinetyczna wzrasta, gdy się podnosi, przeciwnie, jego energia potencjalna wzrasta, a energia kinetyczna maleje;
Z ułożonego równania wynika, że
Zatem prędkość kątowa wahadła w dowolnym momencie zależy jedynie od położenia zajmowanego przez jego środek ciężkości i w tym położeniu przyjmuje zawsze tę samą wartość. Zależność tego rodzaju występuje tylko podczas poruszania się pod wpływem sił potencjalnych.
Systemy rozpraszające. Rozważmy układ mechaniczny, który oprócz sił potencjalnych podlega siłom oporu, które w warunkach ziemskich są nieuniknione (opór środowiska, tarcie zewnętrzne i wewnętrzne). Następnie z równania (50) otrzymujemy: lub
gdzie jest praca sił oporu. Ponieważ siły oporu są skierowane przeciwko ruchowi, wartość jest zawsze ujemna. Dlatego też, gdy rozważany układ mechaniczny się porusza, następuje spadek lub, jak to się mówi, rozproszenie (rozproszenie) energii mechanicznej. Siły powodujące to rozproszenie nazywane są siłami rozpraszającymi, a układ mechaniczny, w którym zachodzi rozpraszanie energii, nazywany jest układem rozpraszającym.
Przykładowo dla omówionego powyżej wahadła (ryc. 320) na skutek tarcia w osi i oporu powietrza energia mechaniczna z czasem będzie się zmniejszać, a jej oscylacje wygasną; jest to system rozpraszający.
Uzyskane wyniki nie są sprzeczne z ogólnym prawem zachowania energii, ponieważ energia mechaniczna utracona przez układ rozpraszający jest przekształcana w inne formy energii, na przykład w ciepło.
Jednak nawet w obecności sił oporu układ mechaniczny może nie być rozpraszający, jeśli utracona energia jest kompensowana przez napływ energii z zewnątrz. Na przykład, jak widzieliśmy, pojedyncze wahadło będzie systemem rozpraszającym. Ale w wahadle zegarowym strata energii jest kompensowana przez okresowy dopływ energii z zewnątrz w wyniku opuszczania ciężarków lub sprężyny głównej, a wahadło będzie wykonywać nietłumione oscylacje, zwane samooscylacjami.
Samooscylacje różnią się od oscylacji wymuszonych (patrz § 96) tym, że nie powstają pod wpływem zależnej od czasu siły zakłócającej, a ich amplituda, częstotliwość i okres są określone przez właściwości samego układu (w przypadku oscylacji wymuszonych, amplituda, częstotliwość i okres zależą od siły zakłócającej).
