Усі введені раніше величини характеризували лише механічний рух. Однак форм руху матерії багато, постійно відбувається перехід від однієї форми руху до іншої. Необхідно запровадити фізичну величину, характеризує рух матерії переважають у всіх формах її існування, з допомогою якої можна було б кількісно порівнювати різні форми руху матерії.
Енергія- міра руху матерії переважають у всіх її формах. Основна властивість всіх видів енергії – взаємоперетворюваність. Запас енергії, що має тіло, визначається тією максимальною роботою, яку тіло може здійснювати, витративши свою енергію повністю. Енергія чисельно дорівнює максимальної роботі, яку тіло може здійснити, і вимірюється у тих самих одиницях, як і робота. При переході енергії з одного виду до іншого потрібно підрахувати енергію тіла або системи до і після переходу і взяти їхню різницю. Цю різницю прийнято називати роботою: .
Т. о., фізична величина, що характеризує здатність тіла виконувати роботу, називається енергією.
Механічна енергія тіла може бути обумовлена або рухом тіла з деякою швидкістю або знаходженням тіла в потенційному полі сил.
Кінетична енергія.
Енергія, яку має тіло внаслідок свого руху, називається кінетичною. Робота, виконана над тілом, дорівнює приросту його кінетичної енергії. Знайдемо цю роботу для випадку, коли рівнодіюча всіх прикладених до тіла сил дорівнює .
Робота, здійснена тілом за рахунок кінетичної енергії, дорівнює втраті цієї енергії.
Потенціальна енергія.
Якщо в кожній точці простору на тіло впливають інші тіла з силою, величина якої може бути різною в різних точках, кажуть, що тіло знаходиться в полі сил або в силовому полі.
Якщо лінії дії всіх цих сил проходять через одну точку – силовий центр поля, – а величина сили залежить лише від відстані до цього центру, то такі сили називаються центральними, а поле таких сил – центральним (гравітаційне, електричне поле точкового заряду).
Поле постійних у часі сил називається стаціонарним.
Поле, в якому лінії дії сил – паралельні прямі, розташовані на однаковій відстані одна від одної – однорідне.
Усі сили в механіці поділяються на консервативні та неконсервативні (або дисипативні).
Сили, робота яких залежить від форми траєкторії, а визначається лише початковим і кінцевим положеннями тіла у просторі, називаються консервативними.
Робота консервативних сил замкнутим шляхом дорівнює нулю. Усі центральні сили є консервативними. Сили пружної деформації є консервативними силами. Якщо у полі діють лише консервативні сили, поле називається потенційними (гравітаційне поле).
Сили, робота яких залежить від форми шляху, називаються неконсервативними (сили тертя).
Потенційною енергією називають частину загальної механічної енергії системи, яка визначається лише взаємним розташуванням тіл, що становлять систему, та характером сил взаємодії між ними. Потенціальна енергія- це енергія, яку мають тіла або частини тіла внаслідок їх взаємного розташування.
Поняття потенційної енергії вводиться в такий спосіб. Якщо тіло знаходиться в потенційному полі сил (наприклад, у гравітаційному полі Землі), кожній точці поля можна порівняти деяку функцію (названу потенційною енергією) так, щоб робота А 12, що здійснюється над тілом силами поля при його переміщенні з довільного положення 1 в інше довільне положення 2, дорівнювала убутку цієї функції на шляху 1®2:
де - значення потенційної енергії системи в положеннях 1 і 2.
Записане співвідношення дозволяє визначити значення потенційної енергії з точністю до деякої невідомої адитивної постійної. Проте, ця обставина немає жодного значення, т.к. у всі співвідношення входить лише різниця потенційних енергій, що відповідають двом положенням тіла. У кожній конкретній задачі промовляють вважати потенційну енергію якогось певного положення тіла рівною нулю, а енергію інших положень брати по відношенню до нульового рівня. Конкретний вид функції залежить від характеру силового поля та вибору нульового рівня. Оскільки нульовий рівень вибирається довільно, може мати від'ємні значення. Наприклад, якщо прийняти за нуль потенційну енергію тіла, що знаходиться на поверхні Землі, то в полі сил тяжіння поблизу земної поверхні потенційна енергія тіла масою m, піднятого на висоту h над поверхнею, дорівнює (рис. 5).
де – переміщення тіла під дією сили тяжіння;
Потенційна енергія цього тіла, що лежить на дні ями глибиною H, дорівнює
У розглянутому прикладі йшлося про потенційну енергію системи Земля-тіло.
Потенційною енергією може мати як система взаємодіючих тіл, але окремо взяте тіло. У цьому випадку потенційна енергія залежить від взаємного розташування частин тіла.
Виразимо потенційну енергію пружно деформованого тіла.
Потенційна енергія пружної деформації, якщо прийняти, що потенційна енергія недеформованого тіла дорівнює нулю; k- Коефіцієнт пружності, x- Деформація тіла.
У загальному випадку тіло одночасно може мати і кінетичну, і потенційну енергії. Сума цих енергій називається повною механічною енергієютіла: .
Повна механічна енергія системи дорівнює сумі її кінетичної та потенційної енергії. Повна енергія системи дорівнює сумі всіх видів енергії, якими має система.
Закон збереження енергії – результат узагальнення багатьох експериментальних даних. Ідея цього закону належить Ломоносову, який виклав закон збереження матерії та руху, а кількісне формулювання дане німецьким лікарем Майєром та натуралістом Гельмгольцем.
Закон збереження механічної енергії: у полі тільки консервативних сил повна механічна енергія залишається постійною в ізольованій системі тел. Наявність диссипативних сил (сил тертя) призводить до диссипації (розсіювання) енергії, тобто. перетворення її на інші види енергії та порушення закону збереження механічної енергії.
Закон збереження та перетворення повної енергії: повна енергія ізольованої системи є постійна величина.
Енергія ніколи не зникає і не з'являється знову, а лише перетворюється з одного виду на інший в еквівалентних кількостях. У цьому полягає фізична сутність закону збереження і перетворення енергії: незнищенність матерії та її руху.
Енергія - найважливіше поняття у механіці. Що таке енергія? Існує безліч визначень, і ось одна з них.
Що таке енергія?
Енергія - це здатність тіла виконувати роботу.
Розглянемо тіло, яке рухалося під дією якихось сил, змінило свою швидкість з v 1 → до v 2 → . У цьому випадку сили, що діють на тіло, здійснили певну роботу A .
Робота всіх сил, які діють тіло, дорівнює роботі рівнодіючої сили.
F р → = F 1 → + F 2 →
A = F 1 · s · cos α 1 + F 2 · s · cos α 2 = F р cos α.
Встановимо зв'язок між зміною швидкості тіла і роботою, досконалою силами, що діють на тіло. Для простоти вважатимемо, що на тіло діє одна сила F → , спрямована вздовж прямої лінії. Під дією цієї сили тіло рухається рівноприскореним і прямолінійним. У цьому випадку вектори F → , v → , a → , s → збігаються за напрямком і їх можна розглядати як величини алгебри.
Робота сили F → дорівнює A = Fs. Переміщення тіла виражається формулою s = v 2 2 - v 1 2 2 a. Звідси:
A = F s = F · v 2 2 - v 1 2 2 a = m a · v 2 2 - v 1 2 2 a
A = m v 2 2 - m v 1 2 2 = m v 2 2 2 - m v 1 2 2 .
Як бачимо, робота, здійснена силою, пропорційна до зміни квадрата швидкості тіла.
Визначення. Кінетична енергія
Кінетична енергія тіла дорівнює половині добутку маси тіла на квадрат його швидкості.
Кінетична енергія – енергія руху тіла. За нульової швидкості вона дорівнює нулю.
Теорема про кінетичну енергію
Знову звернемося до розглянутого прикладу та сформулюємо теорему про кінетичну енергію тіла.
Теорема про кінетичну енергію
Робота прикладеної до тіла сили дорівнює зміні кінетичної енергії тіла. Дане твердження справедливе і тоді, коли тіло рухається під дією сили, що змінюється за модулем і напрямом.
A = EK 2 - EK 1 .
Таким чином, кінетична енергія тіла маси m , що рухається зі швидкістю v → , дорівнює роботі, яку сила повинна здійснити, щоб розігнати тіло до цієї швидкості.
A = m v 2 2 = EK.
Щоб зупинити тіло, потрібно здійснити роботу
A = - m v 2 2 = - E K
Кінетична енергія – це енергія руху. Поряд із кінетичною енергією є ще потенційна енергія, тобто енергія взаємодії тіл, яка залежить від їхнього становища.
Наприклад, тіло підняте над поверхнею землі. Чим вище воно підняте, тим більшою буде потенційна енергія. Коли тіло падає вниз під дією сили тяжіння, ця сила виконує роботу. Причому робота сили тяжіння визначається лише вертикальним переміщенням тіла і залежить від траєкторії.

Важливо!
Взагалі про потенційну енергію можна говорити лише у тих сил, робота яких залежить від форми траєкторії тіла. Такі сили називаються консервативними.
Приклади консервативних сил: тяжкість, сила пружності.
Коли тіло рухається вертикально вгору, сила тяжіння здійснює негативну роботу.
Розглянемо приклад, коли шар перемістився з точки з висотою h 1 в точку з висотою h 2 .

При цьому сила тяжіння здійснила роботу, рівну
A = - mg (h 2 - h 1) = - (m g h 2 - mg h 1) .
Ця робота дорівнює зміні величини m g h взятому з протилежним знаком.
Величина Е П = m g h - Потенційна енергія в полі сили тяжіння. На нульовому рівні (на землі) потенційна енергія тіла дорівнює нулю.
Визначення. Потенціальна енергія
Потенційна енергія - частина повної механічної енергії системи, що у полі консервативних сил. Потенційна енергія залежить від положення точок, що становлять систему.
Можна говорити про потенційну енергію в полі сили тяжіння, потенційну енергію стиснутої пружини і т.д.
Робота сили тяжіння дорівнює зміні потенційної енергії, взятій із протилежним знаком.
A = - (E П 2 - E П 1).
Зрозуміло, потенційна енергія залежить від вибору нульового рівня (початку координат осі OY). Наголосимо, що фізичний сенс має зміна потенційної енергії при переміщенні тіл один щодо одного. За будь-якого вибору нульового рівня зміна потенційної енергії буде однаковою.
При розрахунку руху тіл у полі гравітації Землі, але на значних відстанях від неї, до уваги слід брати закон всесвітнього тяжіння (залежність сили тяжіння від відстані до центу Землі). Наведемо формулу, яка виражає залежність потенційної енергії тіла.
E П = - G m M r.
Тут G – гравітаційна стала, M – маса Землі.
Потенційна енергія пружини
Припустимо, що в першому випадку ми взяли пружину і подовжили її на величину x . У другому випадку ми спочатку подовжили пружину на 2x, а потім зменшили на x. В обох випадках пружина виявилася розтягнута на x, але це було зроблено у різний спосіб.
При цьому робота сили пружності при зміні довжини пружини на x в обох випадках була однакова і рівна
A у п р = - A = - k x 22.
Величина E у п р = k x 2 2 називається потенційною енергією стиснутої пружини. Вона дорівнює роботі сили пружності під час переходу з цього стану тіла у стан із нульовою деформацією.
Якщо ви помітили помилку в тексті, будь ласка, виділіть її та натисніть Ctrl+Enter
За рахунок його знаходження у полі дії сил. Інше визначення: потенційна енергія - це функція координат, що є складовою в лагранжіані системи, і описує взаємодію елементів системи. Термін «потенційна енергія» був запроваджений у XIX столітті шотландським інженером та фізиком Вільямом Ренкіном.
Одиницею виміру енергії у СІ є Джоуль.
Потенційна енергія приймається рівною нулю для деякої конфігурації тіл у просторі, вибір якої визначається зручністю подальших обчислень. Процес вибору цієї зміни називається нормуванням потенційної енергії.
Коректне визначення потенційної енергії може бути дано лише у полі сил, робота яких залежить тільки від початкового та кінцевого положення тіла, але не від траєкторії його переміщення. Такі сили називаються консервативними.
Також потенційна енергія є характеристикою взаємодії кількох тіл або тіла та поля.
Будь-яка фізична система прагне стану з найменшою потенційною енергією.
Суворіше, кінетична енергія є різниця між повною енергією системи та її енергією спокою; таким чином, кінетична енергія – частина повної енергії, обумовлена рухом.
Кінетична енергія
Розглянемо систему, що складається з однієї частинки, і запишемо рівняння руху:
Є результуюча всіх сил, що діють на тіло. Скалярно помножимо рівняння на переміщення частки. Враховуючи, що , Отримаємо:
- момент інерції тіла
- Кутова швидкість тіла.
Закон збереження енергії.
Закон збереження енергії - фундаментальний закон природи, встановлений емпірично і полягає в тому, що енергія ізольованої (замкненої) фізичної системи зберігається з часом. Іншими словами, енергія не може виникнути з нічого і не може зникнути в нікуди, вона може лише переходити з однієї форми до іншої.
З фундаментальної точки зору, згідно з теоремою Нетер, закон збереження енергії є наслідком однорідності часу і в цьому сенсі є універсальним, тобто властивим системам різної фізичної природи. Інакше кажучи, кожної конкретної замкнутої системи, незалежно від її природи можна визначити якусь величину, звану енергією, яка зберігатиметься у часі. При цьому виконання цього закону збереження в кожній конкретно взятій системі обґрунтовується підпорядкуванням цієї системи своїм специфічним законам динаміки, взагалі кажучи різним для різних систем.
Однак у різних розділах фізики з історичних причин закон збереження енергії формулюється по-різному, у зв'язку з чим йдеться про збереження різних видів енергії. Наприклад, у термодинаміці закон збереження енергії виражається у вигляді першого початку термодинаміки.
Оскільки закон збереження енергії відноситься не до конкретних величин і явищ, а відображає загальну, застосовну скрізь і завжди закономірність, то правильнішим є його ім'я не законом, а принципом збереження енергії.
З математичної точки зору закон збереження енергії еквівалентний твердженню, що система диференціальних рівнянь, що описує динаміку даної фізичної системи, має перший інтеграл руху, пов'язаний з
Імпульс тіла
Імпульсом тіла називається величина, що дорівнює добутку маси тіла на його швидкість.
Слід пам'ятати, що йдеться про тіло, яке можна подати як матеріальну точку. Імпульс тіла ($р$) називають також кількістю руху. Поняття кількості руху було запроваджено у фізику Рене Декартом (1596—1650). Термін «імпульс» виник пізніше (impulsus у перекладі з латинської означає «поштовх»). Імпульс є векторною величиною (як і швидкість) і виражається формулою:
$p↖(→)=mυ↖(→)$
Напрямок вектора імпульсу завжди збігається із напрямом швидкості.
За одиницю імпульсу СІ приймають імпульс тіла масою $1$ кг, що рухається зі швидкістю $1$ м/с, отже, одиницею імпульсу є $1$ кг $·$ м/с.
Якщо на тіло (матеріальну точку) діє постійна сила протягом проміжку часу $∆t$, то постійним буде прискорення:
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
де, $(υ_1)↖(→)$ і $(υ_2)↖(→)$ — початкова та кінцева швидкості тіла. Підставивши це значення у вираз другого закону Ньютона, отримаємо:
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
Розкривши дужки та скориставшись виразом для імпульсу тіла, маємо:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
Тут $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ — зміна імпульсу за час $∆t$. Тоді попереднє рівняння набуде вигляду:
$∆p↖(→)=F↖(→)∆t$
Вираз $∆p↖(→)=F↖(→)∆t$ є математичним записом другого закону Ньютона.
Твір сили на час її дії називають імпульсом сили. Тому зміна імпульсу точки дорівнює зміні імпульсу сили, що діє на неї.
Вираз $∆p↖(→)=F↖(→)∆t$ називається рівнянням руху тіла. Слід зауважити, що одна й та сама дія — зміна імпульсу точки — може бути отримана малою силою за великий проміжок часу і великою силою за малий проміжок часу.
Імпульс системи тел. Закон зміни імпульсу
Імпульсом (кількістю руху) механічної системи називається вектор, що дорівнює сумі імпульсів усіх матеріальних точок цієї системи:
$(p_(сист))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
Закони зміни та збереження імпульсу є наслідком другого та третього законів Ньютона.
Розглянемо систему, що складається із двох тіл. Сили ($F_(12)$ і $F_(21)$ малюнку, із якими тіла системи взаємодіють між собою, називаються внутрішніми.
Нехай крім внутрішніх сил на систему діють зовнішні сили $(F_1)↖(→)$ і $(F_2)↖(→)$. Для кожного тіла можна записати рівняння $∆p↖(→)=F↖(→)∆t$. Склавши ліві та праві частини цих рівнянь, отримаємо:
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
Згідно з третім законом Ньютона $(F_(12))↖(→)=-(F_(21))↖(→)$.
Отже,
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
У лівій частині стоїть геометрична сума змін імпульсів усіх тіл системи, що дорівнює зміні імпульсу самої системи — $(∆p_(сист))↖(→)$. ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ можна записати:
$(∆p_(сист))↖(→)=F↖(→)∆t$
де $F↖(→)$ — сума всіх зовнішніх сил, які діють тіло. Отриманий результат означає, що імпульс системи можуть змінити лише зовнішні сили, причому зміна імпульсу системи спрямоване так само, як зовнішня сумарна сила. У цьому вся суть закону зміни імпульсу механічної системи.
Внутрішні сили змінити сумарний імпульс системи що неспроможні. Вони лише змінюють імпульси окремих тіл системи.
Закон збереження імпульсу
З рівняння $(∆p_(сист))↖(→)=F↖(→)∆t$ випливає закон збереження імпульсу. Якщо на систему не діють ніякі зовнішні сили, то права частина рівняння $(∆p_(сист))↖(→)=F↖(→)∆t$ звертається в нуль, що означає незмінність сумарного імпульсу системи:
$(∆p_(сист))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
Система, на яку не діють жодні зовнішні сили або рівнодіюча зовнішніх сил дорівнює нулю, називається замкнутої.
Закон збереження імпульсу говорить:
Сумарний імпульс замкнутої системи тіл залишається постійним за будь-яких взаємодій тіл системи між собою.
Отриманий результат справедливий для системи, що містить довільне число тел. Якщо сума зовнішніх сил не дорівнює нулю, але сума їх проекцій на якийсь напрямок дорівнює нулю, то проекція імпульсу системи на цей напрямок не змінюється. Так, наприклад, система тіл на поверхні Землі не може вважатися замкненою через силу тяжіння, що діє на всі тіла, однак сума проекцій імпульсів на горизонтальний напрямок може залишатися незмінною (за відсутності тертя), тому що в цьому напрямку сила тяжіння не діє.
Реактивний рух
Розглянемо приклади, що підтверджують справедливість закону збереження імпульсу.
Візьмемо дитячу гумову кульку, надуємо її і відпустимо. Ми побачимо, що коли повітря почне виходити з нього в один бік, сама кулька полетить в інший. Рух кульки є прикладом реактивного руху. Пояснюється воно законом збереження імпульсу: сумарний імпульс системи «кулька плюс повітря у ньому» до закінчення повітря дорівнює нулю; він повинен залишитися рівним нулю та під час руху; тому кулька рухається у бік, протилежну напрямку закінчення струменя, і з такою швидкістю, що його імпульс по модулю дорівнює імпульсу повітряного струменя.
Реактивним рухомназивають рух тіла, що виникає при відділенні від нього з якоюсь швидкістю деякої його частини. Внаслідок закону збереження імпульсу напрям руху тіла при цьому протилежно напрямку руху частини, що відокремилася.
На принципі реактивного руху засновано польоти ракет. Сучасна космічна ракета є дуже складним літальним апаратом. Маса ракети складається з маси робочого тіла (тобто розпечених газів, що утворюються в результаті згоряння палива і викидаються у вигляді реактивного струменя) і кінцевої, або, як кажуть, «сухої» маси ракети, що залишається після викиду з ракети робочого тіла.
Коли реактивний газовий струмінь з великою швидкістю викидається з ракети, сама ракета прямує у протилежний бік. Згідно із законом збереження імпульсу, імпульс $m_(p)υ_p$, що купується ракетою, повинен дорівнювати імпульсу $m_(газ)·υ_(газ)$ викинутих газів:
$m_(p)υ_p=m_(газ)·υ_(газ)$
Звідси випливає, що швидкість ракети
$υ_p=((m_(газ))/(m_p))·υ_(газ)$
З цієї формули видно, що швидкість ракети тим більше, чим більша швидкість газів, що викидаються, і відношення маси робочого тіла (тобто маси палива) до кінцевої («сухої») маси ракети.
Формула $υ_p=((m_(газ))/(m_p))·υ_(газ)$ є наближеною. У ній не враховується, що в міру згоряння палива маса ракети, що летить, стає все менше і менше. Точна формула для швидкості ракети була отримана в 1897 р. К. Е. Ціолковським і носить його ім'я.
Робота сили
Термін «робота» було введено у фізику 1826 р. французьким ученим Ж. Понселе. Якщо в повсякденному житті роботою називають лише працю людини, то у фізиці і, зокрема, у механіці прийнято вважати, що роботу здійснює сила. Фізичну величину роботи зазвичай позначають літерою $ А $.
Робота сили— це міра дії сили, яка залежить від її модуля та напряму, а також від переміщення точки докладання сили. Для постійної сили та прямолінійного переміщення робота визначається рівністю:
$A=F|∆r↖(→)|cosα$
де $F$ — сила, що діє тіло, $∆r↖(→)$ — переміщення, $α$ — кут між силою і переміщенням.

Робота сили дорівнює добутку модулів сили та переміщення та косинуса кута між ними, тобто скалярному добутку векторів $F↖(→)$ і $∆r↖(→)$.
Робота – величина скалярна. Якщо $α 0$, а якщо $90°
При дії на тіло кількох сил повна робота (сума робіт усіх сил) дорівнює роботі результуючої сили.
Одиницею роботи у СІ є джоуль($ 1 $ Дж). $1$ Дж — це робота, яку здійснює сила $1$ Н на шляху в $1$ м у напрямку дії цієї сили. Ця одиниця названа на честь англійського вченого Дж. Джоуля (1818-1889): $1$ Дж = $1$ Н $·$ м. Часто застосовуються також кілоджоулі та мілліджоулі: $1$ кДж $= 1 000$ Дж, $1$ мДж $= 0.001 $ Дж.
Робота сили тяжіння
Розглянемо тіло, що ковзає похилою площиною з кутом нахилу $α$ і висотою $Н$.

Виразимо $∆x$ через $H$ і $α$:
$∆x=(H)/(sinα)$
Враховуючи, що сила тяжіння $F_т=mg$ становить кут ($90° - α$) з напрямом переміщення, використовуючи формулу $∆x=(H)/(sin)α$, отримаємо вираз для роботи сили тяжіння $A_g$:
$A_g=mg·cos(90°-α)·(H)/(sinα)=mgH$
З цієї формули видно, що робота сили тяжіння залежить від висоти і залежить від кута нахилу площини.
Звідси слідує що:
- робота сили тяжіння залежить від форми траєкторії, якою рухається тіло, лише від початкового і кінцевого становища тіла;
- при переміщенні тіла по замкнутій траєкторії робота сили тяжіння дорівнює нулю, тобто сила тяжіння — консервативна сила (консервативними називаються сили, що мають таку властивість).
Робота сил реакції, дорівнює нулю, оскільки сила реакції ($N$) спрямована перпендикулярно до переміщення $∆x$.
Робота сили тертя
Сила тертя спрямована протилежно до переміщення $∆x$ і становить з ним кут $180°$, тому робота сили тертя негативна:
$A_(тр)=F_(тр)∆x·cos180°=-F_(тр)·∆x$
Оскільки $F_(тр)=μN, N=mg·cosα, ∆x=l=(H)/(sinα),$ то
$A_(тр)=μmgHctgα$
Робота сили пружності
Нехай на нерозтягнуту пружину довжиною $l_0$ діє зовнішня сила $F↖(→)$, розтягуючи її на $∆l_0=x_0$. У положенні $x=x_0F_(упр)=kx_0$. Після припинення дії сили $F↖(→)$ у точці $х_0$ пружина під дією сили $F_(упр)$ стискається.

Визначимо роботу сили пружності за зміни координати правого кінця пружини від $х_0$ до $х$. Оскільки сила пружності на цій ділянці змінюється лінійно, у законі Гука можна використовувати її середнє значення на цій ділянці:
$F_(упр.пор.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
Тоді робота (з урахуванням того, що напрямки $(F_(упр.ср.))↖(→)$ і $(∆x)↖(→)$ збігаються) дорівнює:
$A_(упр)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
Можна показати, що вигляд останньої формули залежить від кута між $(F_(упр.ср.))↖(→)$ і $(∆x)↖(→)$. Робота сил пружності залежить лише від деформацій пружини у початковому та кінцевому станах.
Таким чином, сила пружності, подібно до тяжкості, є консервативною силою.
Потужність сили
Потужність - фізична величина, що вимірюється ставленням роботи до проміжку часу, протягом якого вона зроблена.
Іншими словами, потужність показує, яка робота відбувається за одиницю часу (у СІ - за $ 1 $ с).
Потужність визначається формулою:
де $N$ - потужність, $А$ - робота, виконана за час $ ∆t $.
Підставивши у формулу $N=(A)/(∆t)$ замість роботи $A$ її вираз $A=F|(∆r)↖(→)|cosα$, отримаємо:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
Потужність дорівнює добутку модулів векторів сили та швидкості на косинус кута між цими векторами.
Потужність у системі СІ вимірюється у ватах (Вт). Один ват ($1$ Вт) — це така потужність, за якої за $1$ з відбувається робота $1$ Дж: $1$ Вт $= 1$ Дж/с.
Ця одиниця названа у частину англійського винахідника Дж. Ватта (Уатта), який побудував першу парову машину. Сам Дж. Ватт (1736-1819) користувався іншою одиницею потужності - кінською силою (к. с.), яку він ввів для того, щоб можна було порівнювати працездатності парової машини та коня: $ 1 $ к.с. $ = 735.5 $ Вт.
У техніці часто застосовуються більші одиниці потужності — кіловат і мегават: $1$ кВт $= 1000$ Вт, $1$ МВт $= 1000000$ Вт.
Кінетична енергія. Закон зміни кінетичної енергії
Якщо тіло або кілька тіл, що взаємодіють між собою (система тіл) можуть виконувати роботу, то кажуть, що вони мають енергію.
Слово «енергія» (від грец. energia — дія, діяльність) нерідко вживається у побуті. Так, наприклад, людей, які можуть швидко виконувати роботу, називають енергійними, які мають велику енергію.
Енергія, яку має тіло внаслідок руху, називається кінетичною енергією.
Як і у випадку визначення енергії взагалі, про кінетичну енергію можна сказати, що кінетична енергія — це здатність тіла, що рухається, виконувати роботу.
Знайдемо кінетичну енергію тіла масою $m$, що рухається зі швидкістю $υ$. Оскільки кінетична енергія - це енергія, обумовлена рухом, нульовим станом для неї є стан, в якому тіло спочиває. Знайшовши роботу, необхідну повідомлення тілу даної швидкості, ми знайдемо його кінетичну енергію.
Для цього підрахуємо роботу на ділянці переміщення $∆r↖(→)$ при збігу напрямків векторів сили $F↖(→)$ та переміщення $∆r↖(→)$. У цьому випадку робота дорівнює
де $∆x=∆r$

Для руху точки з прискоренням $α=const$ вираз для переміщення має вигляд:
$∆x=υ_1t+(at^2)/(2),$
де $ υ_1 $ - Початкова швидкість.
Підставивши в рівняння $A=F·∆x$ вираз для $∆x$ з $∆x=υ_1t+(at^2)/(2)$ і скориставшись другим законом Ньютона $F=ma$, отримаємо:
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
Виразивши прискорення через початкову $υ_1$ і кінцеву $υ_2$ швидкості $a=(υ_2-υ_1)/(t)$ і підставивши $A=ma(υ_1t+(at^2)/(2))=(mat)/ (2)(2υ_1+at)$ маємо:
$A=(m(υ_2-υ_1))/(2)·(2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
Прирівнявши тепер початкову швидкість до нуля: $υ_1=0$, отримаємо вираз для кінетичної енергії:
$E_K=(mυ)/(2)=(p^2)/(2m)$
Таким чином, тіло, що рухається, володіє кінетичною енергією. Ця енергія дорівнює роботі, яку необхідно зробити, щоб збільшити швидкість тіла від нуля до $υ$.
З $E_K=(mυ)/(2)=(p^2)/(2m)$ випливає, що робота сили по переміщенню тіла з одного положення до іншого дорівнює зміні кінетичної енергії:
$A=E_(K_2)-E_(K_1)=∆E_K$
Рівність $A=E_(K_2)-E_(K_1)=∆E_K$ виражає теорему про зміну кінетичної енергії.
Зміна кінетичної енергії тіла(матеріальної точки) за деякий проміжок часу дорівнює роботі, виконаної за цей час силою, що діє на тіло.
Потенціальна енергія
Потенційною енергією називається енергія, яка визначається взаємним розташуванням тіл, що взаємодіють, або частин одного і того ж тіла.
Оскільки енергія визначається як здатність тіла виконувати роботу, то потенційну енергію, природно, визначають як роботу сили, яка залежить тільки від взаємного розташування тіл. Такою є робота сили тяжіння $A=mgh_1-mgh_2=mgH$ і робота сили пружності:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
Потенційною енергією тіла,взаємодіє із Землею, називають величину, рівну добутку маси $m$ цього тіла на прискорення вільного падіння $g$ і на висоту $h$ тіла над поверхнею Землі:
Потенційною енергією пружно деформованого тіла називають величину, що дорівнює половині добутку коефіцієнта пружності (жорсткості) $k$ тіла на квадрат деформації $∆l$:
$E_p=(1)/(2)k∆l^2$
Робота консервативних сил (тяжкості та пружності) з урахуванням $E_p=mgh$ і $E_p=(1)/(2)k∆l^2$ виражається так:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
Ця формула дозволяє дати загальне визначення потенційної енергії.
Потенційною енергією системи називається залежна від становища тіл величина, зміна якої при переході системи з початкового стану в кінцеве і роботі внутрішніх консервативних сил системи, взятої з протилежним знаком.
Знак «мінус» у правій частині рівняння $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ означає, що при виконанні роботи внутрішніми силами (наприклад, падіння тіла на землю під дією сили тяжіння в системі "камінь - Земля") енергія системи зменшується. Робота та зміна потенційної енергії у системі завжди мають протилежні знаки.
Оскільки робота визначає лише зміна потенційної енергії, то фізичний зміст у механіці має лише зміну енергії. Тому вибір нульового рівня енергії довільний і визначається виключно міркуваннями зручності, наприклад, простотою запису відповідних рівнянь.
Закон зміни та збереження механічної енергії
Повна механічна енергія системиназивається сума її кінетичної та потенційної енергій:
Вона визначається положенням тіл (потенційна енергія) та їх швидкістю (кінетична енергія).
Відповідно до теореми про кінетичну енергію,
$E_k-E_(k_1)=A_p+A_(пр),$
де $А_р$ - робота потенційних сил, $А_(пр)$ - робота непотенційних сил.
У свою чергу робота потенційних сил дорівнює різниці потенційної енергії тіла в початковому $Е_(р_1)$ і кінцевому $Е_р$ станах. Враховуючи це, отримаємо вираз для закону зміни механічної енергії:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(пр)$
де ліва частина рівності – зміна повної механічної енергії, а права – робота непотенційних сил.
Отже, закон зміни механічної енергіїкаже:
Зміна механічної енергії системи дорівнює роботі всіх непотенційних сил.
Механічна система, у якій діють лише потенційні сили, називається консервативною.
У консервативній системі $А_(пр) = 0$. звідси випливає закон збереження механічної енергії:
У замкнутій консервативній системі повна механічна енергія зберігається (не змінюється з часом):
$E_k+E_p=E_(k_1)+E_(p_1)$
Закон збереження механічної енергії виводиться із законів механіки Ньютона, які застосовуються для системи матеріальних точок (або макрочасток).
Проте закон збереження механічної енергії справедливий і системи мікрочастинок, де самі закони Ньютона не діють.
Закон збереження механічної енергії є наслідком однорідності часу.
Однорідність часуполягає в тому, що при однакових початкових умовах перебіг фізичних процесів не залежить від того, в який час ці умови створені.
Закон збереження повної механічної енергії означає, що при зміні кінетичної енергії в консервативній системі повинна змінюватись і її потенційна енергія, тому їхня сума залишається постійною. Це означає можливість перетворення одного виду енергії на інший.
Відповідно до різних форм руху матерії розглядають різні видиенергії: механічну, внутрішню (рівну сумі кінетичної енергії хаотичного руху молекул щодо центру мас тіла та потенційної енергії взаємодії молекул один з одним), електромагнітну, хімічну (яка складається з кінетичної енергії руху електронів та електричної енергії їх взаємодії один з одним та з атомними ядрами ), ядерну та ін. Зі сказаного видно, що розподіл енергії на різні видидосить умовно.
Явища природи зазвичай супроводжуються перетворенням одного виду енергії на інший. Так, наприклад, тертя частин різних механізмів призводить до перетворення механічної енергії на тепло, тобто в внутрішню енергію.У теплових двигунах, навпаки, відбувається перетворення внутрішньої енергії на механічну; в гальванічних елементах хімічна енергія перетворюється на електричну тощо.
Нині поняття енергії одна із основних понять фізики. Це поняття нерозривно пов'язане з уявленням про перетворення однієї форми руху на іншу.
Ось як у сучасній фізиці формулюється поняття енергії:
Енергія - загальна кількісна міра руху та взаємодії всіх видів матерії. Енергія не виникає з нічого і не зникає, вона може лише переходити з однієї форми до іншої. Поняття енергії пов'язує докупи всі явища природи.
Прості механізми. ККД механізмів
Простими механізмами називаються пристосування, що змінюють величину чи напрям прикладених до тіла сил.
Вони використовуються для переміщення або підйому великих вантажів за допомогою невеликих зусиль. До них відносяться важіль та його різновиди - блоки (рухомий і нерухомий), комір, похила площина та її різновиди - клин, гвинт та ін.
Важіль. Правило важеля
Важель є твердим тілом, здатним обертатися навколо нерухомої опори.

Правило важеля свідчить:
Важель знаходиться в рівновазі, якщо прикладені до нього сили обернено пропорційні їх плечам:
$(F_2)/(F_1)=(l_1)/(l_2)$
З формули $(F_2)/(F_1)=(l_1)/(l_2)$, застосувавши до неї властивість пропорції (твір крайніх членів пропорції дорівнює добутку її середніх членів), можна отримати таку формулу:
Але $F_1l_1=M_1$ - момент сили, що прагне повернути важіль за годинниковою стрілкою, а $F_2l_2=M_2$ - момент сили, що прагне повернути важіль проти годинникової стрілки. Таким чином, $M_1=M_2$, що потрібно було довести.
Важель почав застосовуватися людьми в давнину. З його допомогою вдавалося піднімати важкі кам'яні плити під час будівництва пірамід у Стародавньому Єгипті. Без важеля це було б неможливо. Адже, наприклад, для зведення піраміди Хеопса, що має висоту $147$ м, було використано понад два мільйони кам'яних брил, найменша з яких мала масу $2.5$ тонн!
У наш час важелі знаходять широке застосування як у виробництві (наприклад, підйомні крани), і у побуті (ножиці, кусачки, ваги).
Нерухомий блок
Дія нерухомого блоку аналогічна дії важеля з рівними плечима: $l_1=l_2=r$. Прикладена сила $F_1$ дорівнює навантаженню $F_2$, і умова рівноваги має вигляд:
Нерухомий блокзастосовують, коли потрібно змінити напрямок сили, не змінюючи її величину.
Рухомий блок
Рухомий блок діє аналогічно важелю, плечі якого становлять $l_2=(l_1)/(2)=r$. При цьому умова рівноваги має вигляд:
де $F_1$ - прикладена сила, $F_2$ - навантаження. Застосування рухомого блоку дає виграш чинності вдвічі.
Поліспаст (система блоків)

Звичайний поліспаст складається з $n$ рухомих і $n$ нерухомих блоків. Його застосування дає виграш у силі в $2n$ разів:
$F_1=(F_2)/(2n)$
Ступіньний поліспастскладається з рухомих і одного нерухомого блоку. Застосування статечного поліспасту дає виграш у силі в $2^n$ разів:
$F_1=(F_2)/(2^n)$

Гвинт
Гвинт є похилою площиною, навитою на вісь.
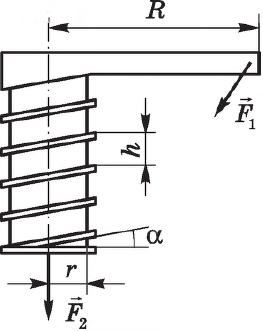
Умова рівноваги сил, що діють на гвинт, має вигляд:
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

де $F_1$ - зовнішня сила, прикладена до гвинта і діюча на відстані $R$ від його осі; $F_2$ - сила, що діє у напрямку осі гвинта; $ h $ - крок гвинта; $r$ - середній радіус різьблення; $α$ - Кут нахилу різьблення. $R$ — довжина важеля (гайкового ключа), що обертає гвинт із силою $F_1$.
Коефіцієнт корисної дії
Коефіцієнт корисної дії(ККД) - ставлення корисної роботи до всієї витраченої роботи.
Коефіцієнт корисної дії часто виражають у відсотках та позначають грецькою літерою $η$ («ця»):
$η=(A_п)/(A_3)·100%$
де $А_п$ - корисна робота, $А_3$ - вся витрачена робота.
Корисна робота завжди становить лише частину повної роботи, яку витрачає людина, використовуючи той чи інший механізм.
Частина досконалої роботи витрачається подолання сил тертя. Оскільки $А_3 > А_п$, ККД завжди менше $1$ (або $< 100%$).
Оскільки кожну з робіт у цій рівності можна виразити у вигляді твору відповідної сили на пройдений шлях, то його можна переписати так: $F_1s_1≈F_2s_2$.
Звідси слідує що, виграючи за допомогою механізму в силі, ми в стільки ж разів програємо в дорозі, і навпаки. Цей закон називають золотим правилом механіки.
Золоте правило механіки є наближеним законом, оскільки в ньому не враховується робота з подолання тертя та сили тяжіння частин використовуваних пристроїв. Тим не менш, воно буває дуже корисним при аналізі роботи будь-якого простого механізму.

Так, наприклад, завдяки цьому правилу відразу можна сказати, що робітнику, зображеному на малюнку, при дворазовому виграші в силі підйому вантажу на $10$ см доведеться опустити протилежний кінець важеля на $20$.
Зіткнення тел. Пружний та непружний удари
Закони збереження імпульсу та механічної енергії застосовуються для вирішення задачі про рух тіл після зіткнення: за відомими імпульсами та енергіями до зіткнення визначаються значення цих величин після зіткнення. Розглянемо випадки пружного та непружного ударів.
Абсолютно непружним називається удар, після якого тіла утворюють єдине тіло, що рухається з певною швидкістю. Завдання про швидкість останнього вирішується за допомогою закону збереження імпульсу системи тіл з масами $m_1$ і $m_2$ (якщо йдеться про два тіла) до і після удару:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
Очевидно, що кінетична енергія тіл при непружному ударі не зберігається (наприклад, при $(υ_1)↖(→)=-(υ_2)↖(→)$ і $m_1=m_2$ вона дорівнює нулю після удару).
Абсолютно пружним називається удар, у якому зберігається як сума імпульсів, а й сума кінетичних енергійтіл, що ударяються.
Для абсолютно пружного удару справедливі рівняння
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2) )^2)/(2)$
де $m_1, m_2$ - маси куль, $υ_1, υ_2$ -швидкості куль до удару, $υ"_1, υ"_2$ -швидкості куль після удару.
Для потенційного силового поля можна ввести поняття про потенційну енергію як про величину, що характеризує «запас роботи», яким володіє матеріальна точка в даному пункті силового поля. Щоб порівнювати між собою ці «запаси роботи», потрібно домовитися про вибір нульової точки О, в якій умовно вважатимемо «запас роботи» рівним нулю (вибір нульової точки, як і будь-якого початку відліку, проводиться довільно). Потенційною енергією матеріальної точки в даному положенні М називається скалярна величина П, рівна тій роботі, яку зроблять сили поля при переміщенні точки з положення М в нульове
З визначення слідує, що потенційна енергія П залежить від координат х, у, z точки М, тобто що
тобто потенційна енергія в будь-якій точці силового поля дорівнює значенню силової функції в цій точці, взятому зі зворотним знаком.
Звідси видно, що з розгляді всіх властивостей потенційного силового поля замість силової функції можна скористатися поняттям потенційної енергії. Зокрема, роботу потенційної сили замість рівності (57) можна обчислювати за формулою
Отже, робота потенційної сили дорівнює різниці значень потенційної енергії точки, що рухається в початковому і кінцевому її положеннях.
Вирази потенційної енергії для відомих нам потенційних силових полів можна знайти з рівності (59) - (59”), враховуючи, що . Таким чином, буде:
1) для поля сили тяжіння (вісь z вертикально вгору)
2) для поля сили пружності (лінійного)
3) для поля сили тяжіння
![]()
Потенційна енергія системи визначається так само, як і для однієї точки, а саме: потенційна енергія П механічної системи в даному її положенні дорівнює роботі, яку зроблять сили поля при переміщенні системи з цього положення в нульове,
![]()
За наявності кількох полів (наприклад, полів сил тяжкості та сил пружності) для кожного поля можна брати своє нульове положення.
Залежність між потенційною енергією та силовою функцією буде такою самою, як і для точки, тобто.
Закон збереження механічної енергії. Припустимо, що всі зовнішні і внутрішні сили, що діють на систему, потенційні. Тоді
![]()
Підставляючи цей вираз роботи в рівняння (50), отримаємо для будь-якого положення системи: або
Отже, під час руху під впливом потенційних сил сума кінетичної і потенційної енергій системи у кожному її становищі залишається величиною постійної. У цьому полягає закон збереження механічної енергії, що є окремим випадком загального фізичного закону збереження енергії.
Величина називається повною механічною енергією системи, а сама механічна система, на яку виконується закон консервативної системою.
приклад. Розглянемо маятник (рис. 320), відхилений від вертикалі на кут і відпущений без початкової швидкості. Тоді в початковому його положенні, де Р - вага маятника; z – координата його центру тяжіння. Отже, якщо знехтувати всіма опорами, то в будь-якому іншому положенні буде або

Таким чином, вище положення центр тяжкості маятника не може піднятися. При опусканні маятника його потенційна енергія зменшується, а кінетична зростає, при підйомі, навпаки, потенційна енергія зростає, а кінетична зменшується.
Зі складеного рівняння випливає, що
Таким чином, кутова швидкість маятника в будь-який момент часу залежить тільки від положення, яке займає його центром тяжкості, і в даному положенні завжди набуває одного і того ж значення. Такі залежності мають місце лише під час руху під впливом потенційних сил.
Дисипативні системи. Розглянемо механічну систему, яку крім потенційних сил діють неминучі у земних умовах сили опору (опір середовища, зовнішнє і внутрішнє тертя). Тоді з рівняння (50) отримаємо: або
де – робота сил опору. Так як сили опору спрямовані проти руху, то величина завжди негативна Отже, при русі механічної системи, що розглядається, відбувається убування або, як кажуть, диссипація (розсіювання) механічної енергії. Сили, що викликають цю дисипацію, називають дисипативними силами, а механічну систему, в якій відбувається дисипація енергії, - дисипативною системою.
Наприклад, у розглянутого вище маятника (рис. 320) завдяки тертю в осі і опору повітря механічна енергія буде з часом зменшуватися, а його коливання загасатимуть; це дисипативна система.
Отримані результати не суперечать загальному закону збереження енергії, оскільки механічна енергія, що втрачається диссипативною системою, переходить в інші форми енергії, наприклад в теплоту.
Однак і за наявності сил опору механічна система може не бути дисипативною, якщо енергія, що втрачається, компенсується припливом енергії ззовні. Наприклад, окремо взятий маятник, як ми бачили, буде дисипативною системою. Але в маятника годин втрата енергії компенсується періодичним припливом енергії ззовні за рахунок гир або заводної пружини, що опускаються, і маятник буде здійснювати незагасаючі коливання, звані автоколиваннями.
Від вимушених коливань (див. § 96) автоколивання відрізняються тим, що вони відбуваються не під дією сили, що залежить від часу, і що їх амплітуда, частота і період визначаються властивостями самої системи (у вимушених коливань амплітуда, частота і період залежать від обурюючої сили) .
